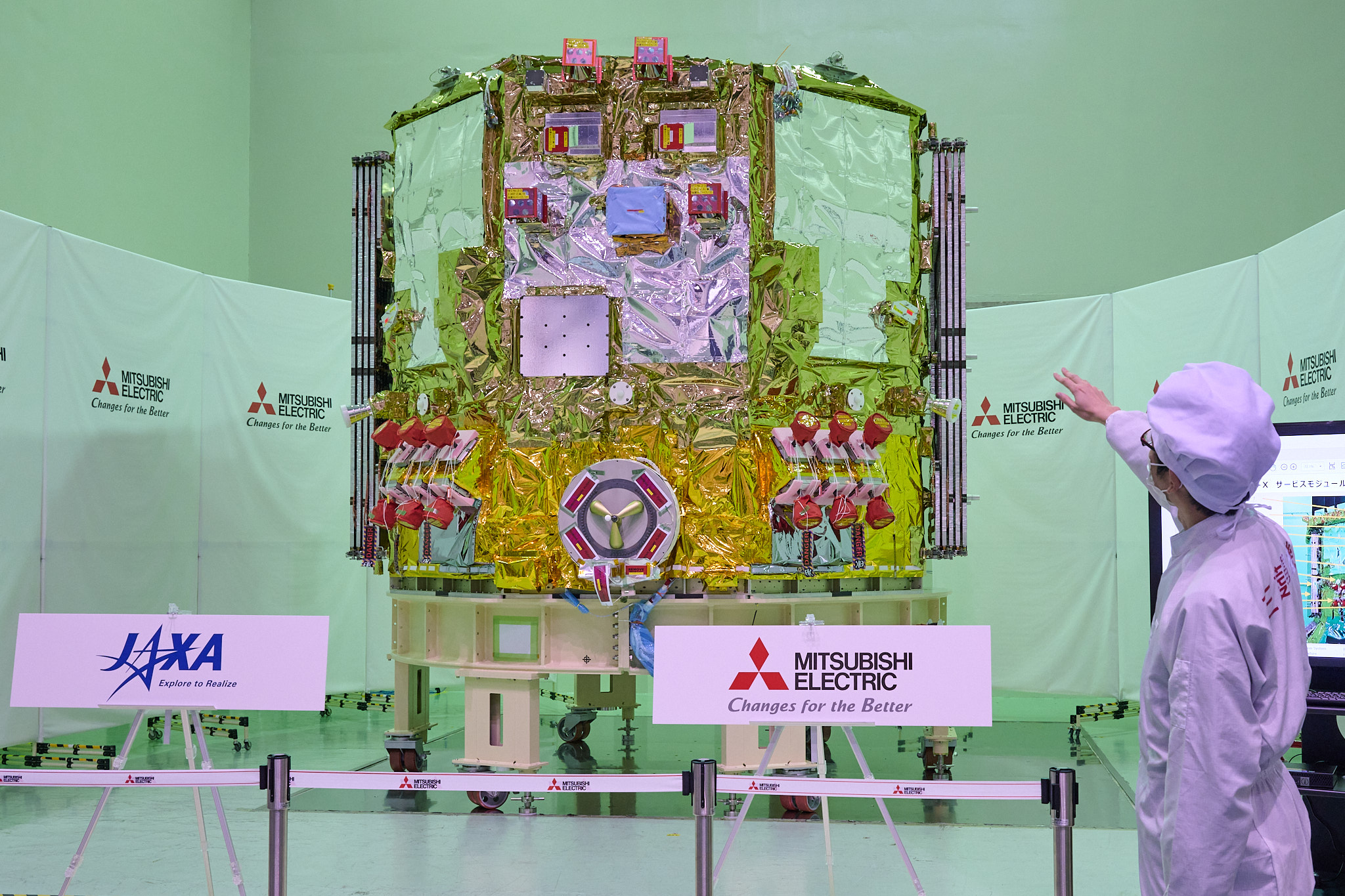
新型宇宙ステーション補給機(HTV-X)サービスモジュール機体公開
2024年12月10日、三菱電機株式会社 鎌倉製作所にて新型宇宙ステーション補給機(HTV-X)のサービスモジュールが公開された。
HTV-Xとは
HTV-Xは国際宇宙ステーションへ生活物資や実験機器などの輸送を担う補給機であり、2009年から2020年まで合計9機運用されたHTVの後継機である。HTV-Xは国際宇宙ステーションの船内物資を搭載する与圧部、宇宙空間を飛行するのに必要な機能をまとめたサービスモジュール、船外機器などを搭載する曝露カーゴ搭載部で構成され、今回公開されたのは三菱電機株式会社が担当するサービスモジュール部分である。
HTVからHTV-Xの主な変更点は以下の通り。
| 変更箇所 | HTV | HTV-X | 効果 |
|---|---|---|---|
| 船体構成 | 与圧区画、非与圧区画、電気モジュール、推進モジュールの一体構成 | 船内物資を搭載する与圧モジュール( HTVの与圧区画をほぼ流用)と、宇宙空間を飛行する際に必要な機能(電気系、推進系、通信系)を全てまとめたサービスモジュールに分離 | 与圧モジュール、サービスモジュールそれぞれを単体で使用可能。将来の月周回有人拠点(ゲートウェイ)輸送機の実現に向けた足がかりに。(ただしHTV-Xそのままではゲートウェイに行けない。重すぎる。月周回軌道に入る際のΔVも足りない。地球との通信も考えないといけない) |
| 推進系の配置と構成 | 推進モジュールに設置されたメインエンジン(500N)計4基 / 機体全体に配置された姿勢制御用スラスタ(120N)計28基 | 姿勢制御用スラスタ(120N)計24基のみに変更、機体全体に配置されていた推進系をサービスモジュール中央に配置 | 配管長が大幅に短くなり重量も削減。モジュール間の推進系配管接続作業も不要になり組立作業も簡素化。24基のスラスタは同方向のスラスタ3基×8方向で構成されているが、姿勢変更には3基のうち1基で十分な設計とすることで有人宇宙の2 Fail Safe(二つ同時に故障しても機能する)を実現している(再突入時の軌道離脱などでは三基同時使用も可能) |
| 太陽電池パネル | 機体全体の表面に設置(トータル2kW) | サービスモジュール左右に展開式の大型パドルを設置(トータル3kW)。季節により変化する太陽ベータ角に対して最大限の発電効率を得るためにパドルをキャントさせている | 発生電力が1.5倍に増加、一次電池を廃し二次電池のみに一本化することが可能になった。ハーネス長も短くなり、一次電池廃止とあわせて重量削減に貢献 |
| ロケット搭載時の形態 | 下(ロケット上段側)から推進モジュール、電気モジュール、非与圧部、与圧部 | 下(ロケット上段側)から与圧部、サービスモジュール、曝露カーゴ搭載部 | 一番重たい与圧部を下から支える必要がなくなり構造も軽量化。その分より多く推薬を搭載することでISS輸送ミッション終了後の実証ミッションも可能に |
| 曝露カーゴの搭載方法 | 非与圧区画の曝露パレットに搭載 | ロケット搭載時に一番上になるサービスモジュールの天面(曝露カーゴ搭載部)に搭載 | 非与圧区画の容積に制限されていた曝露カーゴのサイズが、サービスモジュール天面から上のフェアリングの空間(衛星包絡域)いっぱいのサイズまで載せられるようになった。HTVでは与圧・非与圧あわせて49㎥だった貨物容積がHTV-Xでは78㎥に増加したが、増加分のほとんどがこの曝露カーゴ搭載部の容積拡大によるもの |
| 与圧区画のサービス向上 | 与圧カーゴへの電源供給機能を持たない | 与圧カーゴへの電源供給・通信機能を追加 | 冷凍・冷蔵庫など電源供給が必要なカーゴ(給電カーゴ)を運転したまま輸送可能に |
| 与圧部ハッチの場所 / レイトアクセス | ロケット搭載時に一番上側 / 約3日前 | ロケット搭載時一番下側 / 約24時間前 | PAFの横にあけた穴から搬入した与圧カーゴを与圧モジュール内まで持ち上げるリフターの撤収に要する時間、ハッチクローズ後のリークチェックや熱防護材取り付けに要する時間などを短縮することで実現 |
| 打上げ機と衛星フェアリング | H-IIB / 川崎重工製フェアリング | H3-24W / beyond gravity(旧RUAG)製フェアリング | 他のH3コンフィギュレーション(30S、22S、22L、24L)向けのフェアリングは川崎重工製だが、HTV-X打上げ用のH3-24Wではレイトアクセス用の大型開口部をフェアリングのロケット分離面近くに設ける必要があり、設計・製造経験のあるbg社に発注することでコスト削減 |
| 船体寿命 | ISS係留期間最長45日 | ISS係留期間6か月に加えてISS離脱後最大一年半の活動が可能(トータル2年) | 太陽電池パドルや推薬タンクの大型化と合わせて、物資輸送だけでなく技術実証のためのプラットフォームとしての機能を付加 |
| 通信経路 | データ中継衛星(TDRS)を経由 | TDRS経由に加えて、地上との直接通信も可能に | ISSまでの往復と地球再突入はISSのミッションなのでTDRSを使えるが、ISS離脱から地球再突入までの実証ミッション期間中はTDRSを自由に使えないので直接通信機能をもたせた |


右側の大きな丸はロボットアームで掴むための把手(PVGF)で、ここから電力供給も可能。
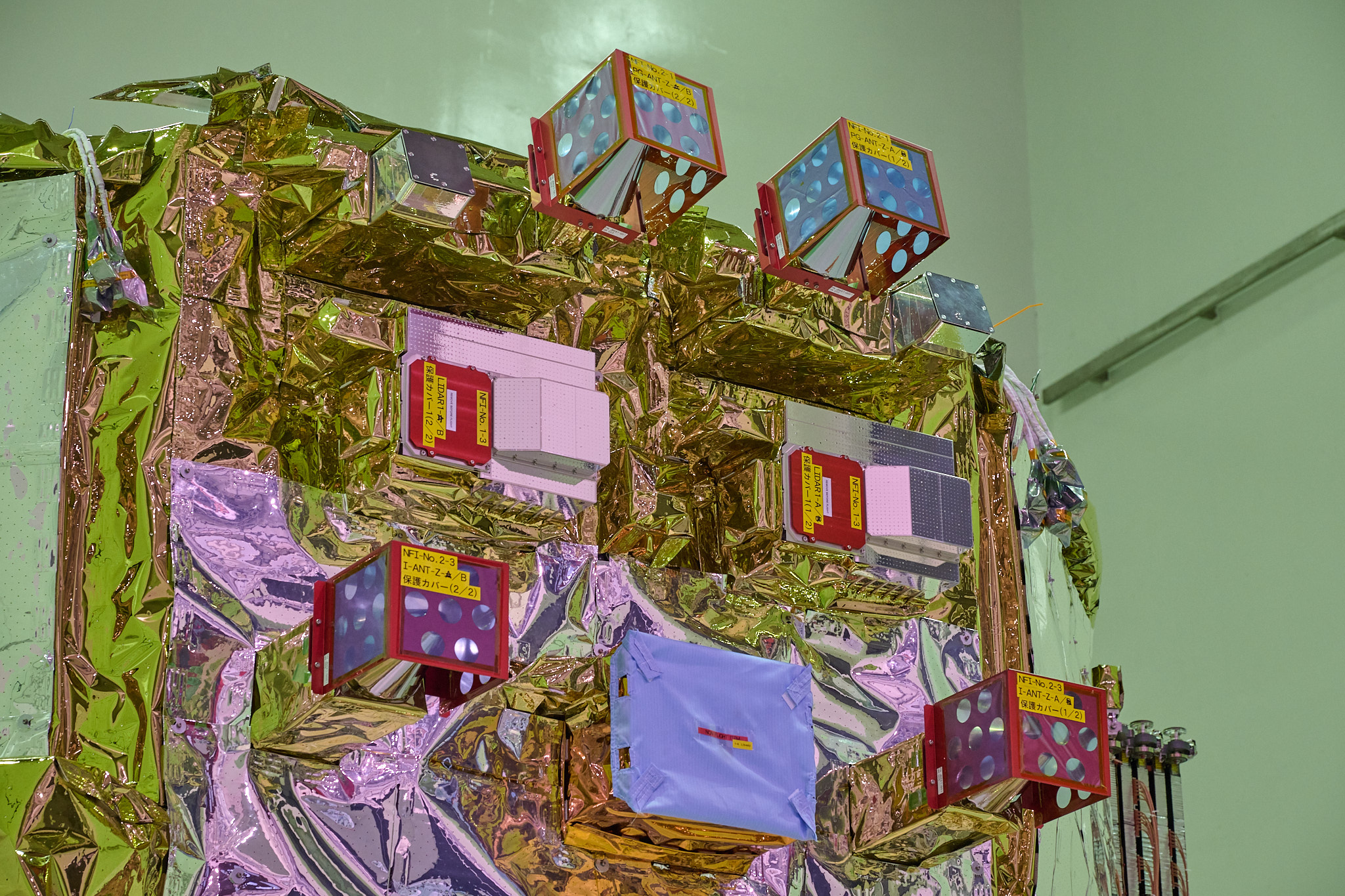
HTV-Xは技術実証のためのプラットフォームとしての利用も念頭に開発が進められてきたが、1号機では「超小型衛星放出」「SLR反射器実証」「展開型軽量平面アンテナの軌道上実証」が予定されている
| 超小型衛星放出(H-SSOD) | サービスモジュールと与圧モジュールをつなぐ与圧モジュールアダプタ(PMA)に取り付けた衛星放出機構からISSより高い高度(最大500km)に6Uサイズ衛星を最大4機放出。「きぼう」エアロックから超小型衛星を放出するJ-SSODに比べて高度が高くなるので軌道寿命(周回軌道上に存在する期間)が長くなる |
| SLR反射器実証 (Mt.FUJI) | 地上のSLR(衛星レーザ測距)局からレーザを照射し、反射してきた光を検知するまでの時間からSLR局と衛星の距離を測るためのリフレクター。HTV-Xで特殊な姿勢運動を行った際のSLR局での観測データからHTV-Xの軌道・姿勢を推定。実際の姿勢運動と照らし合わせることで推定精度を評価。これは将来的にMt.FUJIを搭載した宇宙機が宇宙ゴミとなった際に、地上からの高精度な姿勢運動推定の足がかりとなる |
| 展開型軽量平面アンテナの軌道上実証 (DELIGHT) | 曝露カーゴ搭載部に搭載。JAXA研究開発部門の宇宙太陽光発電システム(SSPS)研究チームが実施。将来の大型宇宙構造物構築を見据えたパネル展開・結合機構を展開して挙動や構造を検証。軽量平面アンテナの受信実験や次世代宇宙用太陽電池セルの軌道上実証も行う |
また2号機ではゲートウェイ補給で必要となる自動ドッキング技術を獲得するための自動ドッキング技術実証が行われる。これはHTVのように宇宙飛行士の操作するロボットアームで把持してもらい共通結合機構(Common Berthing Mechanism: CBM)で結合・分離するのではなく、宇宙船が自ら国際ドッキングアダプタ(International Docking Adapter: IDA)を用いた自動ドッキング・離脱を行う、SpaceXのCrew DragonやBoeing Starlinerと同等の機能の実現を目指したものである。宇宙飛行士が常時滞在する国際宇宙ステーションと異なり、無人の期間がほとんどの月周回有人拠点・ゲートウェイでは自動ドッキング機能が不可欠だ。
| 自動ドッキング技術実証 | 物資輸送ミッション終了後、国際宇宙ステーションから一旦離れて距離をとりながら一周したのち、曝露カーゴ搭載部に設置した自動ドッキング機構を使って天頂側のIDAに自動ドッキング・離脱を実証 |
自動ドッキング機構は他の曝露カーゴのハンドリングの邪魔にならないように高さ1.8mほどの筒状の構造物(通称「土管」)でかさあげされているが、ここでも高さのある曝露カーゴを搭載可能なHTV-Xの特徴が活かされている。
HTV-X 1号機は2025年度の打上げを目指している。
記者説明会
登壇者(以下敬称略)
- 三菱電機株式会社 宇宙システム事業部 事業部長 市川 卓
- 三菱電機株式会社 鎌倉製作所 宇宙インフラシステム部 HTV-Xプロジェクト統括 鵜川 晋一
- 宇宙航空研究開発機構 有人宇宙部門 新型宇宙ステーション補給機プロジェクトチーム プロジェクトマネージャ 伊藤 徳政
- 三菱電機株式会社 鎌倉製作所 宇宙インフラシステム部 将来輸送機プロジェクト統括 蒲原 信治
- 宇宙航空研究開発機構 有人宇宙技術部門 新型宇宙ステーション補給機プロジェクトチーム ファンクションマネージャ 若月 孝夫
はじめに

HTV-Xは国際宇宙ステーションの運用に欠かせない、宇宙飛行士の生活物資や実験機器などの輸送を担う補給機であり、2009年から2020年まで運用されたHTVの後継機であり次世代版としてJAXAの元、開発された。
HTV-Xは食料など宇宙飛行士向けの積荷を搭載する与圧モジュールと、これを行先まで運んでいくサービスモジュールで構成され、三菱電機はサービスモジュールの開発を担当している。今回HTV-X 1号機用のサービスモジュールが完成し、鎌倉製作所から出荷する運びとなったことから公開を企画した。
HTV-Xは打ち上げられたあとで秒速8キロで地球を周回する国際宇宙ステーションにドッキングする。このステーションまで安全に飛行し、接近し、所定の位置でピタッと止まる、そういった役割をサービスモジュールが担う。さらに宇宙ステーションを離脱したあとも実証実験で活躍できるように設計されている。
HTV-Xは将来の国際宇宙探査においても活用できるよう発展性をもたせてある。現在アメリカを中心に検討が進められている月周回有人拠点・ゲートウェイへの物資補給についてもHTV-Xをベースとした検討が行われている。弊社はHTV-Xで培った技術を活用し、今後様々な宇宙空間での活動、宇宙利用に貢献していきたい。(市川)
概要説明
HTV-Xは、2009年から2020年までに合計9機でISSへ物資を輸送した宇宙ステーション補給機HTV(こうのとり)の後継機として現在開発がすすめられているもので、9機成功したHTVの開発・運用技術を引き継いで物資補給を行う。

HTV-XはHTVに比べて能力の増強、およびユーザーサービスを向上させている。またISSを離脱して再突入するまでの間、バス系の機能・性能を提供することで実験を行う実証プラットフォームとしての機能も追加している。さらに月周回有人拠点ゲートウェイをはじめとした将来のミッションにおいて物資輸送など活用可能なシステムを目指して現在開発をすすめている。
与圧モジュール、曝露モジュールあわせた輸送能力は、HTVの4トンに対して約1.5倍を実現し、HTVに比べて大きな容積のものも搭載可能。与圧部はHTVを踏襲する形だが、電気モジュール・推進モジュールなどを統合してサービスモジュールという形に集約している。また非与圧部は無くし、サービスモジュールの上にある曝露カーゴ搭載部に機能をまとめている。
システム全体の取りまとめ、システム設計、モジュールを組み合わせたあとの試験などは三菱重工が担当、与圧モジュールも三菱重工にお願いしている。サービスモジュール、曝露カーゴ搭載部については三菱電機が担当、また三菱電機の下で、サービスモジュールを形成するいくつかのサブシステムについてIHIエアロスペースにお願いしている。通信アンテナ、GPSアンテナ、スラスターなどはサービスモジュールに集約。太陽電池パドルは展開型を採用しHTVに比べて1.5倍の発生電力。
与圧カーゴを搭載する与圧モジュールはロケットと結合するような形で配置している。HTVでは最終的な荷物を約3日前に搭載していたが、HTV-Xでは約24時間前でも荷物を積めるように工夫している。曝露カーゴ搭載部は広い空間が使えるようになった。大型のカーゴや大型の実験機器がフェアリング内の空間を有効活用できるのがHTV-Xの大きな特徴である。
ISSへの物資輸送を終えてから再突入するまでに技術的な実証等を行う実証プラットフォームについて。1号機では高度約400kmのISSから100km程度上昇して小型衛星を放出。その後搭載したレーザー反射器を用いて将来のデブリ除去・検知につながる実験を行う。また将来の大型軽量アンテナの要素技術獲得に向けた、展開型の軽量平面アンテナの実証実験を行う。
2号機では、既にアメリカのSpaceX DragonやBoeing Starlinerで実証されている、ロボットアームを使わずに自動でISSでドッキングする技術を実証する計画を進めている。これはHTV-X本来の目的であるISSへの物資輸送を行ったあとに実施する。
1号機の準備状況について。与圧モジュールは約2年前に完成し現在種子島で保管。HTV-Xを運用する筑波宇宙センターの運用管制室も整備を完了。 1号機はH3ロケットから分離して数分後、姿勢が安定した状態で太陽電池パドルを展開。30秒〜1分程度で展開が終了する。ISSよりも低い軌道を飛行しながらISSに追いつき、次第に接近、ISSの下方約10mでISSと同じ速度で「止まった」ような形となり、ISSにロボットアームで結合される。これはHTVで培った技術を有効活用した確実な運用。(伊藤)
HTV-Xサービスモジュール概要説明
HTVで弊社は電機モジュールを担当していた。今回HTV-Xでは大きくサービスモジュールと与圧モジュールという構成の中でサービスモジュールを担当している。サービスモジュールも大きく2つの要素で構成されていて、大型の船外実験装置等を載せられる曝露カーゴ搭載部と、航法・誘導制御や通信、電力、推進系といった、いわゆる人工衛星のバス機能が一つに収まったサービスモジュール本体。

HTV-X全体で全長8m、直径4.4m、質量は機体・推薬・カーゴ全部合わせて16トンということで、HTVに近い大きさではあるが、他の衛星と比較して非常に大きな機体となっている。その中でサービスモジュールは長さ5.2m、直径4.4mだが、展開型の太陽電池パドルを右左両方に展開すると大体18m。機体質量は3.7トン。HTVとの大きな違いとして、係留期間6か月に加えてISS離脱後最長1.5年間の運用が可能な設計となっている。
サービスモジュールは八角形の構造で、正面のところがISSに近付いていく面、一番、機器が色々載っている面。たとえば中央にあるランデブーセンサーでステーションとの距離を測りながら徐々に近付いていくといった運用を実施する。
先程サービスモジュール本体という言い方をしたが、その中は更に分割されていて、電気系搭載部という各コンポーネントを載せたエリアと、推進系搭載部というタンクやスラスターといった推進系の機器を集約したエリア、そして与圧モジュールと結合する為のアダプタという、大きく3つの構造から構成されている。
HTV-XはHTVをベースに開発しているが、三菱電機では並行して様々な人工衛星の開発を進めていて、その中で多くの宇宙関連機器を開発している。こういった衛星の機器をうまく使うことでHTVから機能・性能を向上させる、というコンセプトで開発している。 機体全体としてはサービスモジュールへの衛星バス機能の集約、つまり宇宙飛行に必要な一通りの機能を集約することで、曝露カーゴの搭載性向上や、推進系の射場作業の効率化といったところを狙っている。また物資補給に加えて実証ミッションフェーズの運用があるので、サービスモジュールとしても各実証ミッション実験機器に対して様々なリソースが提供可能な構成となっている。
実際にステーションに近付いていくところの運用は安全性が非常に求められるので、HTVで培ったランデブー、航法誘導制御をうまく継承しながら、さらに改善出来るところは改善する形で、有人安全を確保した物資補給を実施していく、というコンセプトで開発している。
技術的なHTVとHTV-Xの比較。たとえば通信系に関してHTVではTDRSというNASAのデータ中継衛星との通信と、ISSとの間の近傍通信という二つの通信経路で通信していたが、HTV-Xではもうひとつ地上局との直接通信も用意している。実証ミッションフェーズでは衛星間通信が使えないので地上局とダイレクトに通信しながら運用していく。
電源関連では、HTVでは一次電池、二次電池、ボディマウントの太陽電池という構成だったが、HTV-Xでは展開型の太陽電池パドルを採用することで大電力の確保が可能になり、それもあわせて元々搭載していた一次電池を削除して二次電池に集約することで電源周りの大幅な軽量化を図っている。HTV-Xで開発した二次電池、リチウムイオンバッテリーについてはゲートウェイ補給船、居住モジュールにも搭載が決まっている。
HTVでは航法誘導、データ処理、システム管理といった様々な要素に対してそれぞれ計算機を用意し、複数の計算機で分散処理する複雑なシステムを構築していたが、今回HTV-Xではフライトコンピュータという一つのコンピュータにそれらの機能を統合することでシステム全体の簡素化を図っている。
一方、有人ミッションではTwo fail Safeという、ふたつの故障が発生しても安全を確保するという厳しい要求があるので、このフライトコンピュータの中に多数決処理や様々な冗長機能をもたせることで、全体は簡素化しながらtwo fail safe要求は満たす形で構築している。
ランデブー誘導制御では、ロケットから分離後ステーションに近付いていくところの運用シーケンスは可能な限りHTVの実績を踏襲しながら効率化を図るというコンセプトで開発している。2号機では自動ドッキング機能の開発も実施しているので、従来のランデブ制御に加えて自動ドッキング機能の開発も進めている。
推進系の機能。HTVではメインエンジンに500Nのスラスターを4台、姿勢制御用に120Nのスラスターを28台という構成だったが、HTV-Xではメインエンジンを削除し120Nのスラスター24台のみの構成。またスラスター配置もHTVでは機体の前方、後方にモジュールを跨ぐ形でスラスターを配置していたが、HTV-Xでは中央に推進系を含む配管を全て集約することで全体の構成を非常に簡素にしている。メインエンジンをなくしたことで上の空間が有効に使えるということで、ここに曝露カーゴ搭載部を設け、曝露カーゴや各種実証ミッション搭載可能な構成とした。
(サービスモジュール製造・試験の紹介)電気系搭載部をクリーンで吊り上げて推進系搭載部と結合、これでサービスモジュール本体が完成。これに曝露カーゴ搭載部を結合する形でモジュール全体の組み上げを行っている。
電機適合性試験は、鎌倉製作所の中の電波暗室という試験室でサービスモジュールから出る電磁波を計測したり、外部から電磁波を与えてサービスモジュールが正常に動くか検証。熱真空試験も同じく鎌倉製作所内の大型熱真空チャンバーにサービスモジュールを入れて、軌道上の熱環境・真空環境を模擬した中でサービスモジュールの正常動作を検証。太陽電池パドルの展開試験では、畳まれた状態から自動シーケンスで正常に展開することを地上で検証。超小型衛星放出システム・SSODは最終的に射場の方で搭載されるが、鎌倉では先行して噛み合わせ試験を実施することで、サービスモジュールからの指令で小型衛星放出が正常に実施されることを試験で検証。
HTV-X 1〜3号機の開発ステータス。1号機のサービスモジュールの試験が終わり、このあと射場作業、打上げに進んでいく段階。2号機、3号機も並行して製造・試験は進めている。2号機では自動ドッキング機能のソフトウェア等の開発も並行して進めている。
HTV-Xを活用した事業として、ひとつはポストISSへの活用を考えている。国際宇宙ステーション運用終了後に向けて色々な商業ステーションの計画が立ち上がっているので、そこに対してHTV-Xを核とした物資補給事業を立ち上げていくことを検討している。また将来の国際宇宙探査への発展として月周回有人拠点(ゲートウェイ)への物資補給の検討が始まっているので、こちらもHTV-Xをベースとした物資補給機の検討を進めている。(鵜川)
質疑応答
※質問末尾に(不明)とあるものは発言者の社名が聞き取れなかった、もしくは聞き逃したものです
- 現在検討中の実証実験(共同通信)
- 1号機では、ISSより高い高度で、より長寿命な超小型衛星を放出する。
- またHTV-Xに搭載したレーザリフレクタ(Mt.Fuji)に地上からレーザを当てて反射を見ることで、どこにHTV-Xがいて、どのような姿勢になっているかを観測する、将来のデブリ除去につながる技術
- もうひとつはJAXAの研開部門がやっている、将来の太陽光発電あるいは地球観測の大型アンテナに発展できるような軽量なアンテナの要素技術の展開実験。大型のアンテナの展開試験は小型衛星では出来ない。HTV-Xのような大きな空間を確保し、大きな衛星で実証できるというのが大きな特徴(伊藤)
- 3号機以降もその時々でJAXAの実証実験を行うのか。大学や企業のミッションも受けるのか(共同通信)
- 将来的には外部への機会提供も考えていきたい。既に小型衛星は選定をスペースBD社にお願いし、日本大学の小型衛星を搭載・放出する予定なので、1号機から外部にHTV-Xのこの機能を提供している(伊藤)
- 2号機で自動ドッキング技術実証を行うが、これはゲートウェイに向けたものか、また、2020年のこうのとり9号機でゲートウェイでのドッキングに必要となる無線LAN通信技術のような実験を行っていたが、2号機はそれを踏まえたものなのか(JSTサイエンスポータル)
- HTV-Xの物資輸送は、ロボットアームでつかみISSに結合するという、HTVで培った確実な技術を使用。ISSを離脱後に自動ドッキングを行う
- ゲートウェイでどのようになるかは現在検討中だが、自動ドッキングは将来的に確実に必要となる技術なので2号機で技術実証を行う。
- HTV9号機ではHTVからモニタカメラで写したISSをWi-FiでISSに届け、それをTDRS経由でリアルタイムに筑波の運用室で見る実験を行った。これは2号機で行う自動ドッキング技術実証の様子をリアルタイムで見るカメラおよび通信技術として使われている(伊藤)
- HTVで御社の担当は電気モジュールだけだったが、今回はサービスモジュールということで推進系や曝露部などカバーする範囲が広がった。これについての感想(大塚)
- 三菱電機の中で全て作っているわけではなく、推進系はHTV同様、IHIエアロスペースが三菱電機のグループとして開発している。一方で三菱電機は人工衛星を作り上げる中で推進系の技術を持っているので、一方的に受け取るのではなく技術的にお互い議論しながら推進系を作り上げている。もちろん範囲が広がって大変なところもあるが、うまく衛星等の技術を使いながら作り上げてこれたと思っている。曝露部もIHIエアロスペースがHTVの非与圧部の技術を持っているので、それを借りながら一緒に作り上げている。
- もちろん全体しては大変なところもあるが、全体としてはうまく協力しながらやってこられたと思っている(鵜川)
- HTVに対する優位性(テレビ東京)
- HTVはもともと諸外国の輸送機に比べて輸送能力が高かったが、そのHTVに比べて1.5倍向上している。また、単に物資を輸送するだけでなく、普通の人工衛星と同じように、ミッション機器に技術実証する機会を提供している。これらはドラゴンやシグナスには無い機能。これを個人的には物資輸送と実証機会の「二刀流」と呼んでいる(伊藤)
- これはある意味大谷翔平のように日本人だから出来た、みたいなところはあるのか(テレビ東京)
- 諸外国の輸送機にはない特徴だとは思っている(伊藤)
- ゲートウェイを見据えた機能を改めて(NHK)
- いくつかあると思うが、サービスモジュールと与圧モジュールそれぞれに必要な機能を集約し、それぞれをモジュール単位で単独で使えること、またゲートウェイへの結合の主流となるであろう自動ドッキング技術。こちらは輸送の余剰リソースを使って実験を行う
- 輸送機と同様の機能をサービスモジュールだけで実現しているので、シンプルな仕様で将来のミッションに応用がきく(伊藤)
- たしかコロナ前に開発費350億円と聞いたが、その後変化はあるのか(時事通信)
- 期間が伸びたことも含めて1号機の開発費と機体あわせて356億円(伊藤)
- 1号機だけに載せているハードウェアはあるのか(時事通信)
- 1号機で開発し、これをベースに2号機以降を作っていく。2号機以降も同じものを作り開発コストや作業などを軽減し、効率良く製造をすすめていく(伊藤)
- HTV-Xサービスモジュールの開発は鎌倉製作所でいつから行い、鎌倉製作所に関連した開発費は356億円のうちどの程度なのか(テレビ神奈川)
- サービスモジュールは鎌倉製作所で作っているが、推進系や曝露部など一部は富岡のIAで製造して鎌倉に搬入して全体を組み上げた。開発期間は2017年から7年間。費用に関しては答えを差し控えさせていただく(蒲原)

- 来年度以降の打上げに向けて鎌倉製作所で開発が進められている、と言ってしまうと言い過ぎになるか(テレビ神奈川)
- 基本的には当社が責任を持って、取りまとめという形で進めてきたので、そういった形の表現であれば間違いないと考える。(蒲原)
- 打上時期については打上日同様打上輸送サービス事業者、また届ける先が宇宙ステーションとなるので宇宙ステーションの計画次第でもある。工程表では2025年以降に打上げとなっている。(若月)
- 地上局との直接通信は小型衛星の放出コマンドなどもこれを介して行うという理解でよいか。また、その時地上局はどこを使うのか(秋山)
- HTVもHTV-Xもデータ中継衛星を介して通信してきたが、ISSミッションが終わってからはISSという事業の枠ではなくデータ中継衛星を自由に使えないので、自ら地上局と通信する機能を持たせた。これは地球観測衛星などが行っているものと同等の機能。
- 地上局との直接通信を使うのは技術実証フェーズのみで、その後の再突入はISSの事業なのでデータ中継衛星を用いる。地上局はJAXAの保有局等を使うが、具体的な局名は運用計画に関わるものなので差し控える(若月)
- 実証フェーズについて。資料にはSFUからの流れなども書かれているが、宇宙で出来ることの自由度が上がったことについての今後の展望があれば(秋山)
- たしかに自由度は増している。従来のHTVは全体でひとつ、分割出来ない形だったので、今回与圧部とサービスモジュールが別々に独立して使えるのは非常に自由度の高い機体。サービスモジュール単品としては、今回のような実証ミッションとしての使い方や、あるいは別のものを単独で運んでいけるかなど、社内で検討はしている(蒲原)
- ユーザー側からしてコストも含めてうれしい点、良い点。また技術実証プラットフォームとして、たとえば先端素材や先端デバイスの宇宙空間ならではの実験をしたい企業もあると思うが、その辺りのユースケース。それと二刀流は簡単に出来ることなのか、難しい点(不明)
- ISSへの物資補給という観点ではユーザーサービスがかなり向上したと思っている。たとえば曝露であれば大きなもの、特殊なものが運べる。
- また三菱重工の開発した与圧モジュールも、以前はドライな物資が詰まっていたが、HTV-Xの与圧モジュールは打上時に電源を入れたまま打ち上げられる。従来はパワーオフの状態で打ち上げていたがHTV-Xではパワーを入れた状態で、中で空調も回し、環境も制御した状態でサービスを提供出来る。打上げ時期直前まで荷物を搭載出来ることも大きなサービスポイント。
- 実証プラットフォームという観点で言えばHTVには無かった機能。ミッション機器の実証は人工衛星を用いても出来るが、HTV-Xでは非常に大型の機器を搭載出来る。1号機の大型アンテナ展開は「きぼう」で実施するのは難しい。
- Mt.FujiではHTV-Xにかなり変わった姿勢をとらせる。自由自在な飛行姿勢をとれるので、これを地上から測距することで、地上の観測と軌道上の飛行データを突き合わせて非常に精密な軌道決定の検証が出来る。
- どうやって二刀流が出来たのか。自分自身プロジェクトを立ち上げから関わってきた。HTV 1〜9号機を通して日本の国家の基幹技術として補給機技術が出来たが、新型機を作るのであれば同じようにISSの補給で終わってはいけない、政府からの強いメッセージとしてサービスプラットフォームのような機能を持てないかと、2015年、16年くらいの政府文書に書かれている。そういった使命を受けることで我々は考え方を変えて、単なる補給機ではない、終わったあとにもう1回仕事が出来るようにしようじゃないかと、実は最初から取り組んできた。
- これによりすごく苦労した、非効率になった、といったことはあまり無いと思う。一体として開発したのでしっかり二刀流を獲得できた。(若月)
- 輸送能力がHTVの4トンからHTV-Xで5.82トンとあるが、HTVの頃によく言われていた6トンとの差はラック部分に由来するのか(JST)
- 4トンは実際のカーゴ質量で、6トンと言っていたのはカーゴ搭載構造も含めた値。HTV-Xでは5.82トンに実証機器も加えると6トンを越える搭載質量。これに対して搭載構造は1トン程度。
- HTVの6トンも1号機から9号機で段階的に能力を増強している。具体的にはカーゴ搭載構造が重たいので途中の号機から軽量化した。また機体そのものの質量も、不要と判った電池を下ろすことで軽量化してきたことをJAXAも伝えてきたが、そういう意味ではHTV 1〜9号機からHTV-Xにいきなりジャンプというわけではなく、最後の7、8、9号機くらいでかなり近付ける方策をとっている(若月)
- 同じ6トンという中でも正味の搭載量をじわじわと増やしてきたと(JST)
- はい(若月)
- HTV 9号機の時点で工程表上で1号機はたしか2021年度にあったと思うが、時間がかかった要因(JST)
- 開発が思ったより長くかかったな、というのが正直なところ。一方でHTVの技術があったとはいえ非常に複雑なシステムであり有人ミッションに供するということで安全対策など開発要素が多かったが、必要な時期に開発を終えるという状況で今になっている。
- 与圧モジュールもサービスモジュールも新しく開発したものだが、与圧モジュールの主構造はHTV与圧部を踏襲しているので比較的短期間の開発で出来た。サービスモジュールは機能を集約している分だけ苦労もあったと思う(若月)
- 具体的にどんなところで苦労されたのか(JST)
- 搭載計算機の構成がかなり変わった。HTVでは最初人工衛星のような考え方をしていて、2台の計算機で飛べるように作っていたが、後から安全要求がもうすこし厳しいということで、もう1台小規模な計算機を追加した。今回は新規に計算機を作るということで、改めて3台の計算機を全く違うつなぎ方をして冗長系をもたせ、多数決をとったりといった有人の安全要求を満足するように作っていった。過去分散していた機能を一つの計算機に取り込むなど統合も図った。この計算機の開発にかなり時間を要した。
- 軽量な太陽電池パドルも人工衛星で通常使っているものを採用したが、ISSに係留するにあたり、実際経路からは外れるのだが、船外活動中の宇宙飛行士が通るといった新たな安全要求とかもあり、これも通常の人工衛星の開発より長くかかった(蒲原)
- ゲートウェイに向けたHTV-X開発で、他国に対してどんな優位性をもたせたいか(茜)
- ゲートウェイへの補給は米国と日本の間の取り決めの中で決まってくる。その中では輸送してほしい質量や概ねの時期は決まっているので、それに対してどういうシステムで実行しようか検討している段階。
- 強みではないが、いまのHTV-Xをそのまま月に飛ばせば良いというわけではない。今のままでは重たいので大幅な軽量化が必要。サービスモジュールもエンジンの増強や、現在地球周回のデータ中継衛星を使っている通信といった部分も高度化を図っていかなくてはならない。まずは約束した時期に必要な輸送が出来るようなシステムの実現性を確認していく段階なので、その過程でまた何か強みを生み出せればいいと思うが、今のところこれで勝負だ、というのがあるわけではないのが所直なところ。
- あとは、HTV、HTV-Xの実力を見てもらった結果NASAとして補給を期待したいと言ってもらっているので、実績の蓄積そのものが強み(若月)
- ゲートウェイ向けということでちょっと将来の構想にはなるが、月軌道に入れるところでかなりブレーキをかけなければならない。現在のスラスタでは推力が足りないので、ちょっと大きなスラスターを付けなければならない、といった既に見えている改良点はある。
- 通信に関しても高度化はもちろんある。当社は今年の初めにSLIMを月に着陸させるなど基礎技術は持っているので、そういったところを組み合わせて対応出来ると考える。
- まずはゲートウェイへ輸送するという部分が第一。結局、輸送をきっちり出来るといったところを確保出来ると全体の機数も出てくるので色んなことに発展する余裕が出てくる。まずは足下を固めてから開発を進めていきたい(蒲原)
- ゲートウェイ輸送の時期の目処(井上)
- 日本政府と米国政府の間の取り決めでは2030年頃を目処となっているので、まずHTV-X 1号機、2号機、3号機と続け、2030年頃といわれているHTV-X派生型のゲートウエイ補給機に向けて、あと数年掛けてしっかり取り組んでいく、そんな時期に来ていると思う(若月)
- ポストISSの国内事業パートナーはどんなところなのか(井上)
- 現在色んな方々と協議しているが、当社単独ではなく、三菱重工を中心に他社と色々な枠組みを作っていこうと考えている(市川)
- 小型衛星をISSより高い高度から放出するメリットとは(ロイター通信)
- 超小型衛星にエンジンを付けたものは殆どなく、放出された軌道でミッションを行うものがほとんど。JAXAではISSからの衛星放出を提供していて非常に多く使われているが、ISSより高い軌道で放出する方が軌道寿命、落ちるまでの時間が長くなる。衛星ユーザーにとっては非常に長い時間の運用が出来る(若月)
- それ以外に、500kmぐらいからの放出を要求する用途などはあるのか。たとえば低軌道の衛星を監視するとか(ロイター通信)
- 特にその軌道を指定するということはないと思う。HTV-Xは500kmくらいまでは上がれる。それ以上上がると推進薬の問題で降りられなくなってしまうので概ね500kmぐらいを目標にしている。
- その中で衛星ユーザーが放出してほしい高度や姿勢、方向をかなり自在に出来るのが特徴。把握している範囲では軌道寿命が延びるというのが一番のメリット。
- 一回上がって下がるという点では、スラスターの推力が高くなって可能になったのか(ロイター通信)
- 推力という表現は難しく、使える燃料という意味では、HTV-Xに限らず衛星は質量を出来るだけ小さくしたいが、HTV-Xではわざわざ大型タンクを開発して燃料を積めるようにしている。それはこういったISSのミッション終了後さまざまなミッションが出来るように推進薬量を増やしている。
- エンジンの力という意味では、従来のHTVはもう少し大きいメインエンジンと姿勢制御用の小さいエンジンという組み合わせで使っていた。一個のパワーではHTVの方が推進力があるとも言える。一方HTV-Xは非常に効率的な運用を行うということで、小型のエンジンだけで構成していて、数も減っている。推進力という点ではパワーは落ちるが全体としては非常に効率が良い。(若月)
- 西側というかアメリカ主導の宇宙開発の中でSpaceXがトップ独走だったり、有人ではボーイングがうまくいかなかったといった状況を踏まえた上で、三菱電機が宇宙機を開発するモチベーションは(ロイター通信)
- 今後、宇宙空間を利用するという方向性にあると思う。国際宇宙ステーション、民間のポストISS、あるいはステーションではなく、たとえば推薬補給といったニーズは増えていくと考えている
- HTV-Xでは搭載量で優位性を確保してポジションを確立していきたいが、その次として実証プラットフォームとしてのあり方も含めて、サービスモジュールの万能性を活用した、いろいろな宇宙空間上のニーズに対応出来る、荷物以外を載せて宇宙空間でいろんなことをやっていく、そういった広がりが予測されていると考えている。そういった将来の世界を見据えて宇宙空間上で自由に動いて安全に近付きドッキングする能力を活かしていきたい(市川)
- ISSと結合する共通結合機構はHTVやシグナスが使っているものと全く同じものなのか(鳥嶋)
- 宇宙ステーション側が対向となる共通結合機構をもっているので、それに合わせた機構であり同じ仕様(若月)
- 特に強度増したとか改良したということもなく、全く同じものなのか(鳥嶋)
- 全く同じ(若月)
- 2号機の自動ドッキング機構はクルードラゴン等で使っている国際ドッキングアダプタと同じものなのか(鳥嶋)
- 宇宙ステーション側のドッキングポートは共通のものだが、宇宙機側はそれぞれオリジナル。変えるものでもない。2号機では国産ドッキング機構の開発を目指している。(若月)
- HTV運用時に他国の輸送機と比べた特徴として、CBMは直径が大きいのでより大きなものをISSに持ち込んだり出したり出来るという話があったが、これが国際ドッキングアダプタになると直径が小さくなり利点も失われると思うが、この点が将来の商業宇宙ステーションやゲートウェイへのミッションにおいて何か不利益とならないのか(鳥嶋)
- 直径90cm弱のドッキング機構に比べてCBMは大きなハッチを設けることができる。HTVやHTV-Xも結合機構のリングだけでなくハッチも同じものを使っていて、この大型のハッチがあることで、宇宙ステーションの中に棚のように並んでいる大型のラックのような、ドッキングビークルでは運べないものを運ぶことができる。HTV-Xが最大のものを運べるという特徴がある。
- 今後ゲートウェイではロボットアームでつかんでもらう運用は想定されなくなる。宇宙ステーションには常時数名の宇宙飛行士がいるが、現在アルテミス計画の中で考えられているゲートウェイは基本的に無人の期間がほとんどで、先に宇宙船が物資補給しておいてほしい。そういった時に宇宙飛行士がロボットアームでつかまえる運用はまず想定されないので、ベースラインがドッキングに変わっていく。また現在の「きぼう」に比べてゲートウェイは全体のサイズが小さくなるので、必要な物資量も変わってくる。
- 大きなラックを運べることが今は優位性だが、ちょっと目的地が変わると必ずしも優位性ではなくなってくる。大きすぎるとなる。いま最適な目的地、ゲートウェイなり民間のステーションなりで求められるドッキングにあわせて、中の輸送物資や搭載ラックを変えていく流れなのかな、と(若月)
- 小さいものでよければ自動ドッキング、大きなものを運びたい需要が将来的にあるなら把持して結合する、といった両方の使い方が出来るようになるのか(鳥嶋)
- 商用ステーションが発達していけばそういうことも出来るし、HTV-Xも今までの把持して結合するバーシングタイプもどちらも出来るというのは強みになる。
- 一方、商用ステーションが立ち上がった時に、潤沢にドッキングポートもあれば共通結合機構のような大きなポート、ロボットアームがあるといったことはわからない(若月)
- 曝露カーゴ搭載部に大きなものを搭載出来るという説明があったが、体積とか、HTVから何パーセントアップしたといった指標はあるのか(宇宙作家クラブ)
- HTVでは非与圧部に、航空機の貨物のようにパレットに載った形で入っていた。これによりパレットが収まる非与圧部で容積が限られていた。
- HTV-Xでは機体上部に置いているので高さの制約はあまりない。もちろん機体として成立する適切なサイズはあるが、上限はフェアリングなのでフェアリング内部空間を自由に使えるのが大きな特徴。
- 搭載容積を定量的にとのことだが、貨物の容積がHTVの49㎥からHTV-Xの78㎥に増えている、この増えた分はほぼ曝露。与圧部は主構造のサイズを殆ど変えていないので与圧部の容積はイコールと考えて良い。(若月)
- H3-24LとH3-24Wの違いは(宇宙作家クラブ)
- H3はエンジン2基+SRB4本で変わらない。Wはワイドフェアリング。HTV-Xが非常に大きいこともあり24Lフェアリングでは収まらない。
- またレイトアクセス時にかなりの荷物を積む。普通の人工衛星ならロケットに結合してフェアリングを被せてしまえば殆どやることは無いと思うが、HTV-Xでは組立棟で荷物を搭載後にも人がフェアリング内部に入り、HTV-Xのハッチをあけて荷物を搭載するオペレーションになる。この為にフェアリングに大きなドアをつける必要がある。そういった、ドアをつける開発も可能だということも含めて特注のフェアリングを使っている。(若月)
- ちなみにこのフェアリングも他の形態同様川崎重工製なのか(宇宙作家クラブ)
- 海外製のフェアリングで、beyond gravity(旧RUAG)社製。ホームページにリリースも出ている。(若月)
- 具体的な出荷予定日は(時事通信)
- 出荷できる状態にはなっているが調整中。サービスモジュール本体と曝露カーゴ搭載部は輸送のために分離してあり、それぞれ別に梱包して運ぶ。(蒲原)
- 商業ステーションでは人手の問題もありロボットアーム方式は難しそうだが、ハードウェア、ソフトウェア的にドッキング機構のデファクトスタンダードはあるのか(時事通信)
- ドッキング自体は何十年も昔からあるが、有人ステーションとなると過去のアメリカやロシアの技術を後追いする部分がある。商用ステーションにおいても、まずはアメリカのCLDで進んでいくだろうと考えると、延長線上という意味では現在ISSで使われているものの延長線上になると思うので、ドッキング実証で技術を開発し、それを転用出来るようになればと考えている(蒲原)
- ドッキング時はPMAを使うのか(時事通信)
- アダプタとしてはPMAになる。バーシングで物資を運び、通常通り離脱したあとISSの前から上に向かいドッキングを想定(蒲原)
- HTVではオートランデブードッキングが出来なくて、なぜHTV-Xで出来るようになったのか(NHK)
- 求められていなかったのでやっていなかった、というところはあるが、日本としてドッキングに対応する宇宙機にしていくには独自のドッキング機構を開発する必要がある。
- CBMでは宇宙機側はつかんでもらうが、ドッキングは自分たちから掴みに行く形。待っている宇宙ステーション側のドッキングポートに対して必ずしも真っ直ぐ結合するわけではないので、つかみにいく側のドッキング機構を自分達で開発しなくてはならない。
- 2号機ではセンサーが余分につくということか(NHK)
- ISSの補給という観点では同じ。HTV同様ISS下方に飛んで行ってロボットアームでつかんでもらい、与圧モジュール側から宇宙ステーションに結合するという形はかわらないが、その先のミッションで必要となるドッキングの実証を行うのが2号機。
- 1号機では宇宙ステーションへの物資補給が終わった後、宇宙ステーションから離れて軌道上の実証ミッションを行うが、2号機ではその期間に一度ISSを離れてからもう一度戻り、ドッキング実証のためにISSに結合しにいく、という2回の運用を行う。
- 物資補給後、ISSから離れて通常であれば飛んで行ってしまうところを、ISSから距離をとりながらぐるっと周回していく。現在想定しているのはISSの天頂側にあるドッキングポートにドッキングする。(若月)
- 分離後に人工衛星のような実験を行う使い方がHTVで出来なかった理由、HTVでは月に行けなかったのにHTV-Xでは行ける可能性がある理由(NHK)
- HTVの寿命は短くて、1〜3か月のミッション期間しかなかった。これがHTV-XではISS係留期間が半年、ISSを離れてから1.5年と最大2年くらいの運用に変わるので大きな変更点がある。たとえば軌道上で劣化していく機器があるので、劣化に強い機器に変える。また軌道上実証が出来るように大型の推薬タンクに変えている。地上局との通信機能と、それを介した運用もできる。ただHTV-Xそのままでは月に行けない。ロケットの能力にもよるが、今のままでは重たいので軽量化が必要、月周回時にブレーキをかけるための大型のエンジン、通信機能など様々な改良点が出てくると思う(若月)
- なぜHTV-Xで24時間前のレイトアクセスが可能になったのか(NEC)
- シグナスなど他の輸送機が今では24時間前のレイトアクセスが可能になっているので、HTV-X開発時の目標として24時間前の搭載はやろうと決めていた。これにはレイトアクセスを行ったあとの撤収も考えなくてはならない。HTV-Xではフェアリング、PAFに穴をあけてリフターで積み込むが、これを撤収する時間。またハッチを閉めたあとのリークの点検も早くする、金色の熱防護材を工夫することで、ハッチを閉めたあとの艤装作業も大幅に短くなっている。こうした細かい数時間単位の改良点を積み重ねで80時間前から24時前に至った
- 機体も変わっていて、HTV-Xの24時間搭載時にHTV-Xは電源オンの状態で積み込めるようになった。たとえば冷蔵庫を打上げる際、打上げ80時間前のHTVではオフの状態だったので電源供給出来なかった。HTV-Xでは電源オンの状態なのでそのまま荷物を積みにいける。打上げに向けた準備を進める中で搭載していける。全体の作業の後ろ倒しも含めて24時間を実現している(若月)
- そういう意味では機体の仕様変更というよりは作業性向上の方が大きいと
- 時間との闘いはほとんど作業性であり、作業を行うために、たとえば熱防護材の仕様を変えるといった細かい仕様変更の積み上げである。(若月)
- 曝露の方も同様に給電機能が提供されているのか
- 曝露はどちらかというとサバイバルのための電源。冷えないためのヒーターなどを暖める電源などが多いが、与圧部はバッグだけでなく冷蔵庫のように電源が必要な特殊なカーゴも搭載出来る。(若月)
- 与圧カーゴ・曝露カーゴの質量
- 与圧と曝露は質量の取り合いな部分もあるが、HTVの4トンでは与圧3トンで曝露1トン。HTV-Xの5.82では与圧4.1トンで曝露が1.7(若月)
- 容積として与圧は変わっていないのか
- 与圧部はHTVと変わっていないので容積は変わらない。(若月)
- HTVでは6トンとあったが(不明)
- HTVの4トンのカーゴに対して搭載構造がプラス2トン、HTV-Xでは5.82トンに対して2トンもかかっていなくて1トン強。これにより実際の貨物量を増やせた(若月)
- それは機体の軽量化が大きいのか
- 機体そのものがかなり軽量化している。HTV時代の電機、推進、曝露を合わせた三菱電機部分だけでも1.5トン軽くなっている。軽くなった例はいくつもあるが、たとえば与圧部はアルミの圧力容器なので重い。HTVではこれを上部にもっていったが、HTV-Xでは下部にもってきたので、その他の構造を軽くできる。
- またHTVでは姿勢制御エンジンが与圧部にもあるし推進モジュールにもあった。HTV-Xではサービスモジュールの推進系のところにしかエンジンがない。推薬タンクもそこに入れているので推薬タンクからエンジンまでの配管長がすごく短くなった。
- 太陽電池もHTVでは非与圧部、与圧部に巻いていた。そこで発生した電気を電気モジュールに集めて更に分配していたので電線類が非常に多かった。そういった推進系、電気系の簡素化で質量が大幅に減った(若月)
- ゲートウェイを見据えて各モジュールが単独で動けるようにした、その理由は
- 発展化としてHTV-Xの与圧モジュールだけを使いたいケース、サービスモジュールだけを使いたいケース、サービスモジュールを使って与圧モジュールを別のものに置き換えるケースを考えた際、HTVでは与圧部を取ると別のシステムを持ってきても運用出来ない。与圧部にある姿勢制御を使ったり、構造としても全体で一体になっている。
- 一方でHTV-Xは与圧モジュール、サービスモジュール単体で使える仕様になっている。推薬配管等だけでなく、たとえば与圧部の環境制御は与圧部に集約している。種子島で各モジュールを結合する際にも、推薬配管は無い、電気のコネクタも非常に少ない。そこさえ分離すれば分離しやすい。HTVでは分離なんて出来なかった。
- 斬新なアイデアとして、HTV-Xは軌道上で分離も出来るのではないか。そういったことを念頭におきながらシステムの設計を行ってきたので、結果的にそれぞれが独立して使いやすいシステムが出来たのではないか(若月)

