革新的衛星技術実証4号機 (RAISE-4) 機体公開
2025年10月10日、JAXA筑波宇宙センターで革新的衛星技術実証4号機 (RAISE-4) に関する記者説明会および機体公開が開催された。革新的衛星技術実証4号機は国際競争力の強化や宇宙産業の活性化、人材育成等のために国内の民間企業や大学、研究機関に宇宙実証の機会を提供する「革新的衛星技術実証プログラム」の4号機で、各社・各機関は実証機器・衛星の開発費のみの負担で実証機会を得られる。これまでに1号機(2019年1月打上げ、7機の衛星、13の実証テーマ)、2号機(2021年11月、9機、14テーマ)、3号機(2022年10月、9機、15テーマ)の計3機が打上げられたが、3号機は打上げ機(イプシロン6号機)の失敗で軌道投入に至らなかった(超小型衛星のうち3機は打上げ前のスキーム変更で別ロケットで打上げ)。今回の4号機では3号機において軌道上での実証に失敗したテーマの中から希望を募り、4機のキューブサットおよび6つの実証テーマに再チャレンジの機会が提供された。
RAISE-4は当初イプシロンSロケットでの打上げを予定していたが、2024年11月の第2段モータ再地上燃焼試験時の異常燃焼事象により2025年度内の打上げが困難になった。各実証テーマへのヒアリングの結果、2026年以降の打上げでは実証の意義・価値に影響が生じることが判明したため、2025年度内の打上げが可能な打上げ手段を検討した結果、2025年2月、打上げ機がRocketLab社のElectronに変更された。打上げは8つの実証テーマを搭載したRAISE-4(打上げ目標期間:2025年11月25日〜2025年12月24日)および8機のキューブサット(打上げ目標期間:2026年1月 ~ 2026年3月)の二回に分けられ、ニュージーランド・マヒア半島の射場から打上げられる。
RAISE-4に搭載される8つの実証テーマ、および8機のキューブサットは以下の通り(*の付いているものは再チャレンジ)
RAISE-4搭載実証テーマ
- LEOMI:衛星 MIMO 技術を活用した 920MHz 帯衛星 IoT プラットフォームの軌道上実証(NTT株式会社)*
- GEMINI:民生用 GPU の軌道上評価およびモデルベース開発(三菱電機株式会社)*
- KIR-X:水を推進剤とする超小型統合推進システムの軌道上実証(株式会社 Pale Blue)*
- TDS-PPT:小型衛星用パルスプラズマスラスタ(PPT)の軌道上実証・性能評価(株式会社高橋電機製作所)*
- D-SAIL:超小型衛星用膜面展開型デオービット機構の軌道上実証(株式会社アクセルスペース)*
- HELIOS-R:Society5.0に向けた発電・アンテナ機能を有する軽量膜展開構造物の実証(サカセ・アドテック株式会社)*
- CF-CAM:次世代高性能 CMOS 撮像素子の軌道上実証(マッハコーポレーション株式会社)
- AIRIS:次世代宇宙用 MPUを活用したオンボード AI物体検知及び検知精度向上の軌道上実証(三菱重工業株式会社)
キューブサット
- MAGNARO-Ⅱ (名古屋大学) *
- KOSEN-2R (米子工業高等専門学校) *
- WASEDA-SAT-ZERO-Ⅱ (早稲田大学) *
- FSI-SAT2 (一般財団法人未来科学研究所) *
- OrigamiSat-2 (東京科学大学)
- Mono-Nikko (株式会社大日光・エンジニアリング)
- ARICA-2 (青山学院大学)
- PRELUDE (日本大学)
記者説明会
説明会の様子はYouTubeにアップロードされています(配付資料もこちらから)

登壇者(以下敬称略)
- RAISE-4
- JAXA 研究開発部門 超小型・小型衛星宇宙実証研究ユニット
- ユニット長 小松 雄高(こまつ ゆたか)
- 三菱重工業株式会社 防衛・宇宙セグメント 宇宙事業部 技術部 宇宙機システム設計課
- 上席主任 松浦 真悟(まつうら しんご)
- JAXA 研究開発部門 超小型・小型衛星宇宙実証研究ユニット
- 衛星 MIMO 技術を活用した 920MHz 帯衛星 IoT プラットフォームの軌道上実証(LEOMI)
- NTT 株式会社アクセスサービスシステム研究所 無線エントランスプロジェクト
- プロジェクトマネージャ 山下 史洋(やました ふみひろ)
- NTT 株式会社アクセスサービスシステム研究所 無線エントランスプロジェクト
- 民生用 GPU の軌道上評価およびモデルベース開発(GEMINI)
- 三菱電機株式会社 鎌倉製作所 衛星機器第一部 技術第二課
- 主任 千葉 旭(ちば あきら)
- 三菱電機株式会社 鎌倉製作所 衛星機器第一部 技術第二課
- 水を推進剤とする超小型統合推進システムの軌道上実証(KIR-X)
- 株式会社 Pale Blue
- 代表取締役 浅川 純(あさかわ じゅん)
- 株式会社 Pale Blue
- 小型衛星用パルスプラズマスラスタ(PPT)の軌道上実証・性能評価(TDS-PPT)
- 株式会社高橋電機製作所
- 代表取締役 高橋 徹(たかはし とおる)
- 株式会社高橋電機製作所
- 超小型衛星用膜面展開型デオービット機構の軌道上実証(D-SAIL)
- 株式会社アクセルスペース AxelLiner 事業本部
- 副本部長 倉田 稔(くらた みのる)
- 株式会社アクセルスペース AxelLiner 事業本部
- Society5.0に向けた発電・アンテナ機能を有する軽量膜展開構造物の実証(HELIOS-R)
- サカセ・アドテック株式会社
- 代表取締役専務 酒井 良次(さかい りょうじ)
- サカセ・アドテック株式会社
- 次世代高性能 CMOS 撮像素子の軌道上実証(CF-CAM)
- マッハコーポレーション株式会社 営業部
- 技師長 野口 一秀(のぐち かずひで)
- マッハコーポレーション株式会社 営業部
- 次世代宇宙用 MPUを活用したオンボード AI物体検知及び検知精度向上の軌道上実証(AIRIS)
- 三菱重工業株式会社 防衛・宇宙セグメント 航空機・飛昇体事業部 電子システム技術部
- 主席チーム統括 山本 勤隆(やまもと のりたか)
- 三菱重工業株式会社 防衛・宇宙セグメント 航空機・飛昇体事業部 電子システム技術部
RAISE-4 機体概要説明
小松:JAXA研究開発部門の小松と申します。よろしくお願いいたします。まず私の方から、今回の革新的衛星技術実証4号機の概要についてご説明いたします。まずプログラムの概要になります。革新的衛星技術実証プログラムでは、宇宙産業の国際競争力の強化、活性化、ビジネス促進、人材育成等を目的としまして、大学や研究機関、民間企業に対して新しい技術の宇宙実証の機会を提供するプログラムとなっております。
小松:従来、単独の機関では衛星を自ら開発して打ち上げるということが難しいケースもありましたが、各機関で開発した部品や機器等をJAXAが開発する衛星を使って打上げ軌道上実証を実施できる、ということが特徴になっております。これまで2019年1月の打上げを皮切りに合計4回の軌道上実証の機会を提供してまいりました。今回その4回目の機会になります。2025年度内に9機の衛星・16個の実証テーマを打上げる予定になっております。こういった形で継続的な打上げ機会を提供することで、新しい技術、アイデアを軌道上で実証して、日本の宇宙産業の国際競争力を高めるといった取り組みを進めてまいります。
小松:4号機のご説明の前に、まず1号機から3号機までの概要をご説明したいと思います。1号機は7機の衛星に搭載した13個の実証テーマを、イプシロンロケット4号機で2019年1月に打ち上げております。左側にJAXAが開発したRAPIS-1という小型衛星がございます。こちらに計7つの実証テーマである部品や機器等を搭載しまして、これと共に3つのキューブサットを同時に搭載してロケットで打上げ軌道上実証を行ってまいりました。
小松:続きまして2号機になります。こちらは9機の衛星に搭載した14個の実証テーマをイプシロンロケット5号機で2021年11月に打上げました。JAXAが開発したRAISE-2・小型実証衛星2号機に計6つの搭載機器を実証テーマとして搭載しまして、これと共もに4機のキューブサットを同時にイプシロンロケットで打上げ、軌道上実証を行いました。
小松:続いて3号機の概要になります。こちらは9機の衛星から構成されて15個の実証テーマの実証を行う計画としておりました。JAXAが開発するRAISE-3・小型実証衛星3号機に搭載した7つの搭載機器を軌道上で実証する計画としておりました。これと共にキューブサット5機を合わせてイプシロンロケット6号機で2022年10月に打上げましたが、非常に残念ながら、この実証のケースではイプシロンロケットの打上げに失敗いたしまして、機動投入に至らなかったというような結果となっております。なお、途中で計画変更により打上げスキームを変更することになり、3つの超小型衛星につきましては代替ロケットによって別途打上げを順次行っているという状況でございます。
小松:こちらからが本日のメインテーマ、4号機の概要になります。合計9機の衛星に搭載した16個の実証テーマから構成されております。左側にRAISE-4という衛星の記載がございます。こちらがJAXAが開発している小型実証衛星4号機になりまして、こちらに計8つのテーマである部品・搭載機器を搭載して軌道上実証を行う計画になっております。これと合わせてキューブサット8機を打上げるという計画になります。先ほどご説明の通り3号機において軌道上での実証に一部失敗したテーマがございます。このうち希望するテーマにつきましては今回の4号機を再チャレンジの機会という風に捉えまして、再チャレンジの機会を提供しております。緑色でハッチングしました4機のキューブサトおよび6機の搭載機器に対して今回4号機に再チャレンジの機会を提供しております。
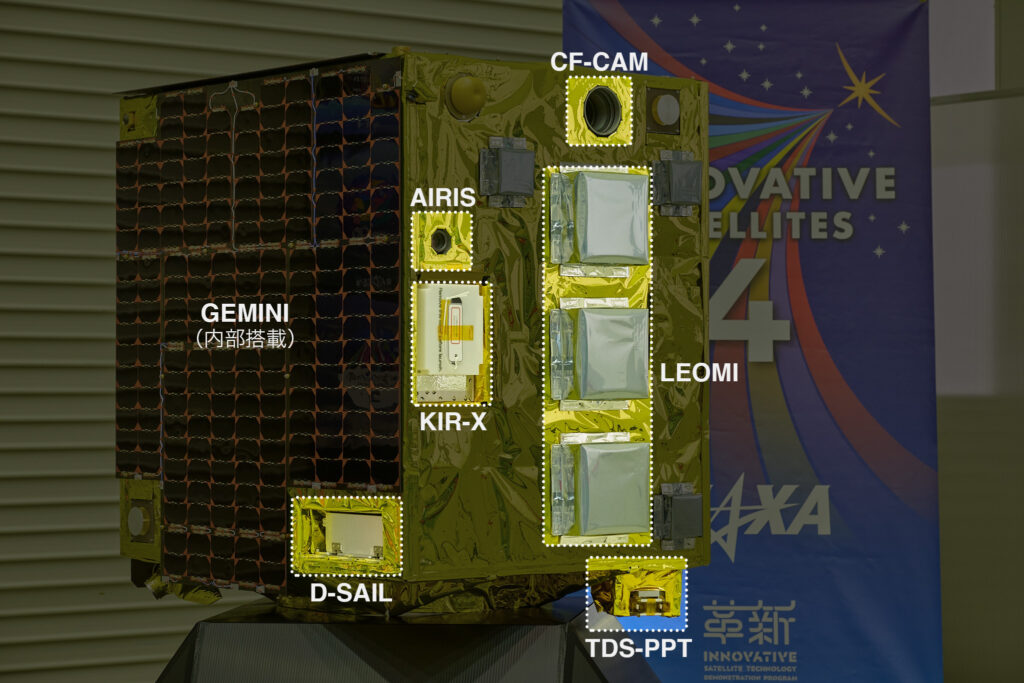
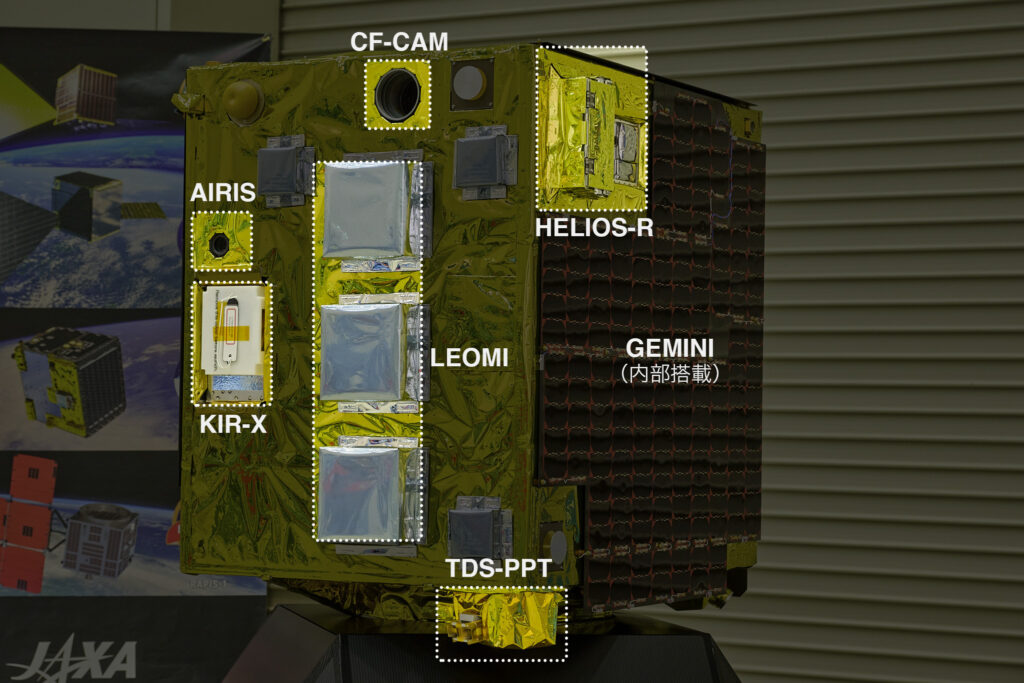
小松:こちらがJAXAが開発する小型実証衛星4号機・RAISE-4の概要になってございます。先ほどの通り8つの実証テーマの機器を衛星に搭載しまして、左下に軌道上の外観図、真ん中に打上げ時の外観図を載せておりますが、こういった形で衛星の内部、外部に8つの機器を搭載しまして軌道上で実証を行うという衛星になっております。左下に記載の通り大きな2つの膜面を展開するのが特徴になっております。
小松:実際に軌道上に打ち上がりますと、各実証テーマから実験要求を受けまして、JAXAの元で衛星の運用を行いまして、実証テーマ機器の実験データ、それから環境データなどを各機器の実証テーマの方へ提供し、その実証テーマの方で評価いただくと、そういった流れで運用を行っていく予定になってございます。
小松:今回の革新的衛星技術実証4号機の打上げにおいて、当初の計画から打上げロケットを変更するというような経緯がございましたので、こちらでご説明いたします。今回の4号機では、当初の計画では3号機までと同様に国内の基幹ロケットであるイプシロンロケット、具体的には現在開発中であるイプシロンSロケットでの打上げを予定しておりましたが、ご記憶にある方もいらっしゃるかもしれませんが、昨年の11月にこのイプシロンSロケットの第2段モーターの再地上年焼試験というものを種子島で行った際に燃焼異常が発生しまして、結果的には当初の計画である2025年度内の打上げが困難になったというような状況になってございます。
小松:これを受けまして各実証テーマの機関の皆様にこの影響についてヒアリング調査しました結果、打ち上げが2026年度以降になると実証の意義・価値に非常に大きな影響が出るということが判明いたしました。この状況を踏まえまして、当初の計画通り2025年度内の打上げを実現したいということで、いくつかの打上げ手段の可能性について検討しました結果、当初のイプシロンSロケットから、米国のRocketLab社の提供するELectronというロケットによる打上げへ変更することにいたしました。下に記載の通りイプシロンSロケットではRAISE-4と8つのキューブサット、それと民間の別の衛星を相乗りで打ち上げる計画でおりましたけども、Electronにつきましては、打上げの能力が質量・サイズともに小さいというロケットでございますので、RAISE-4と8つのキューブサットを2回に分けて打上げるという計画にしております。
小松:こちらのスライドに打上げの概要について記載をしてございます。まずRAISE-4ですね、今年の11月25日から12月24日の1ヶ月間の打上げスロットの中で打上げるという計画にしております。続きましてキューブサットにつきましては、まだ具体的な打上げスロットが決まっておりませんが、翌2026年の1月から3月の間で打上げスロットを定めて打ち上げるという計画になっております。打上げ場所につきましてはニュージーランド・マヒア半島にありますRocketLab社が所有する発射施設から打上げるという計画になっております。なお具体的な打上げ日・時間帯等につきましては現在確定しておりませんので、確定次第公表したいと考えております。
小松:最後にJAXAが開発している小型実証衛星4号機の開発状況につきまして簡単に紹介したいと思います。2023年2月に実証テーマを含めたミッションの定義を行いまして、同年7月からプロジェクト移行しまして、実際に開発を進めてまいりました。その後約2年強の期間をかけまして、設計・製作・組み立て・試験を順次行ってまいりまして、先程の通り、途中で打上げロケットを変更するというような計画変更もございましたが、今月上旬ようやく開発完了に至りまして、来週以降、打上げに向けてニュージーランドに輸送し、その後射場作業、打上げ、という風に順番に作業を進めていく予定になってございます。最後のスライドにRAISE-4の開発時の写真など掲載しております。こちらをご参照いければと思います。
RAISE-4開発概要説明
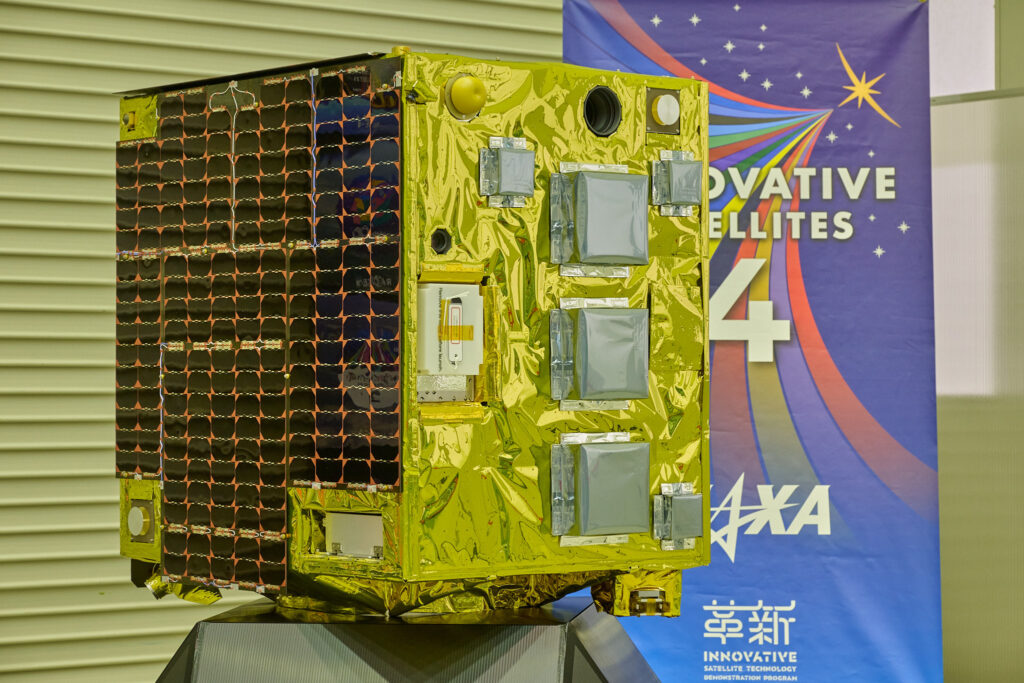
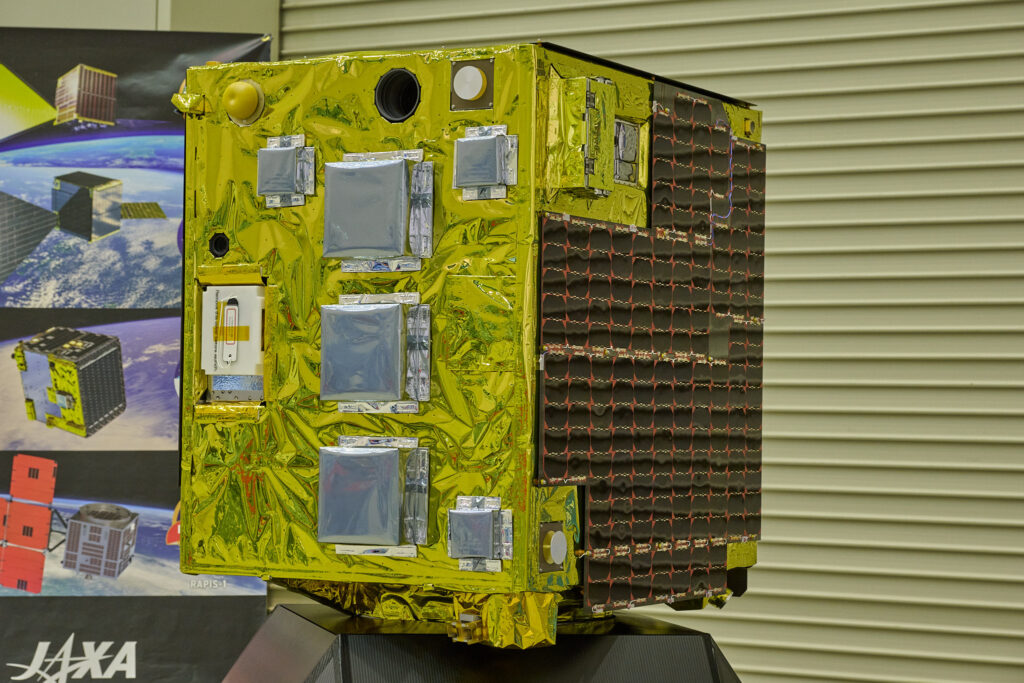
松浦:三菱重工の松浦からRAISE-4の概要の説明の方をさせていただきます。まず打上げですが、先ほど説明がありました通りロケットはElectronでニュージーランドからの打上げとなります。軌道につきましては太陽同期軌道となります。高度は540km、軌道傾斜角については97.5°、降交点通過地方太陽時については15時半となります。衛星の形状についてですが、ボディマウント式の太陽電池パネルを有する箱型となっておりまして、寸法としましては、790×1000×1010mmといった立方体に近い形状となっております。こちらは衛星分離部や展開物を含まない、ロケット打上げ時の形態の寸法がこちらとなっております。質量については110kgとなります。姿勢制御につきましては、3軸指勢制御方式でして、地球指向や太陽指向といった姿勢を取ります。電力につきましては、太陽電池の発生電力の日照時の平均ですが、BOL(Begin of Life)、ミッション初期については215W以上、EOL(End of Life)、ミッション末期の頃には180W以上の発電力といったところでございます。またミッション部に関しては、BoL105W/h、EoL62W/h以上といったようなところとなっております。ミッション期間につきましては、初期運用が2ヶ月間、定常運用が13ヶ月間の計15ヶ月、1年ちょっといった期間となっております。
松浦:RAISE-4の特徴としましては先ほども説明がございましたが、JAXA様の革新的衛星技術実証プログラムにおきまして公募により選定された8つの機器の実証テーマを軌道上に実証するための衛星がRAISE-4となります。で、RAISE-3の打上げ失敗に伴いまして実証機会が喪失されてしまった機器については、先ほども説明ありましたが6機器が再チャレンジで搭載されておりまして、トータル8機器搭載しているといった特徴を持っております。また短期・低コスト開発と信頼性確保の両立が小型実証衛星の重要な開発課題といったところでございます。今回RAISE-4に至りましてはRAISE-3のリピート開発を前提としておりまして、システム設計を早期に確定し、システムでの試験、検証期間を最大限に確保し信頼性向上に取り組んでまいりました。
松浦:リビート開発といったところですので、どの辺がRAISE-3からRAISE-4で変わっているのか、といったところを簡単にご説明しましたのが下の表となっております。大きく3点ございまして、1点目は先ほどから説明させていただいておりますが、実証テーマ機器が1機器増えましてトータル8機器ですね。再チャレンジが6機器、新規に2機器搭載されていると。対応としましては、新規の2機器を従来の6機器と干渉しないところ、余剰スペースに搭載したといった形で対応しております。
松浦:打上げロケットにつきましてもご説明がありましたが、RAISE-3ではイプシロンでございましたが、RAISE-4についてはElectronといった変更が入っているといった形となります。対応としましては、衛星の分離機構が同じになるように調整していただきまして、極力インパクトが影響がないように調整してきたといった形ととなります。3点目ですが、投入軌道ですね。降交点通過地方太陽時がRAISE-3の場合ですと10時半、RAISE-4ですと15時半といったような形で変わっておりまして、この場合、太陽の当たり方が変わってきますので、衛星内の発熱を放熱する放熱面の方を適宜見直した、といった形で対応しているといったところが変更点となっております。
LEOMI
山下:NTT株式会社・山下です。よろしくお願いします。NTTでは低軌道衛星MIMO・IoT伝送装置LEOMIの実験をさせていただきます。具体的な中身は次のスライドでご説明いたしますけども、衛星MIMO技術を活用した920MHz帯の衛星IoTプラットフォームの軌道上実証となります。搭載するものに関しましては、ここに写真がございますけども、LEOMI-TRX、これが実際のRF装置、変復調装置、そういうところを含んでいるものでございまして、あとはLANT(エルアント)、これはIoTのアンテナを3つ、XANT(エックスアント)X帯のアンテナを3つ、これら一式3.7kgのものを搭載させていただくことになりました。共同実施者といたしましてはJAXA研究開発部門様と衛星MIMOに関しまして共同研究を一緒にさせていただいておりますので、一緒に実験をさせていただくという形になっております。
山下:具体的なコンセプトでございます。下の絵を用いて少しご説明をいたします。右側にこのIoTというものがあって、左側にMIMOというものがございます。簡単のために右から左に対して信号の流れで少しご説明をいたしますと、地上で今LoRaとかLPWAの無線端末っていうのがかなり安価で普及しておると思います。そういうような地上のプロトコルの信号の電波を衛星で波形としてキャプチャーしまして、それを一旦メモリに蓄えて、今回のLEOMIで日本上空に来た時に衛星MIMOという形で衛星から地上の基地局に対してダウンリンクすると、そういうような信号の一連の流れを考えております。
山下:技術のポイントといたしましては、まず左側のMIMOに関しましては、衛星に複数のアンテナを載せまして、地上に複数の基地局を置きます。通常1対1の通信なんですけども、この複数のアンテナで異なる信号を送信をするというような形を考えております。そうすることによって、当然同じ周波数で異なる信号が送るので干渉が生じるんですけども、それを基地局で干渉補償すると。これによって周波数利用効率を上げるというようなところの研究開発を進めてまいりたいと思います。IoTに関しましても、既存の1つの方式だけじゃなくて、様々な方式の実証実験をしていきたいなという風に考えております。
GEMINI
千葉:三菱電機の千葉からGEMINIに関してご説明いたします。実証テーマとしては民生GPUの軌道上評価及びモデルベース開発になっております。ミッション概要といたしましては、AI処理、SARの再生処理などの高速信号処理を可能するため、超高速演算が可能な民性GPUの軌道上実証を行いたいという風に考えております。GPUに搭載するソフトウェアの開発に関しましては、モデルベース開発手法を適用して開発期間の短縮、品質向上を目指しております。寸法と質量は記載の通りなんですけども、手の平に乗るサイズ感になっております。
千葉:こちらにGEMINIの目的を示しておりまして、地球観測衛星の例を参考に説明いたします。従来の衛星ですと観測データといったものは衛星の中ではそれほど処理をせずにそのまま地球に送るといったことが一般的でございました。背景といたしましては、宇宙用で使われるプロセッサー等の部品の機能・性能の観点から高い負荷の処理をすることができなかったといった形になっております。それによって観測データをそのまま伝送すると通信に時間がかかるといったような課題がございました。加えて地上におきましても、大規模なサーバーの方で送られたデータを処理をして、それからユーザーの皆様にデータを送るといったことから、一連の時間に非常に長い時間がかかっているといった課題がございました。近年はエッジコンピューティングに代表されるような先端的な部品が民生で登場してきてまいります。そういった部品をうまく活用することによって、我々としては軌道上で観測データを処理をして、より付加価値の高いデータを地球に送ると。その付加価値が高いデータを作る際に通信データも抑えられると、こういった利点がございますので、そういった仕組みを構築して将来作ってまいりたいという風に考えております。
千葉:また地上におきましても、大規模なデータのサーバーといったものは不要で、最小限の簡易な処理のみでユーザーの皆様に送ることが可能であるという風に考えております。こういった未来を実現するために今回の実証機会を活用いたしまして、第1世代と位置付けておりますが、GEMINIによってAIの処理、SARの再生処理、それからSARの中でも変化を抽出処理、それから暗号化の処理といった処理をさせることによって、過酷な宇宙の中で正常に機能するかどうかと、また、エラーもある程度起こるものかと思いますが、そのエラーの種類や頻度といった基礎的なデータを取得することによって、将来のシステム設計でございましたり、第2世代、現在弊社で開発中なんですけれども、そういった未来の開発に生かしてまいりたいという風に考えております。
KIR-X
浅川:株式会社Pale Blue代表取締役の浅川から、水を推進剤とする小型統合推進システム・KIR-X(キールエックス)についてご説明したいと思います。弊社は2020年4月に創業した東京大学発の宇宙スタートアップになります。創業以降この衛星用の推進器の社会実装に向けて取り組んできております。今回弊社として実証させてだくテーマとしましては、先ほど申し上げた通り水を推進剤とする超小型統合推進システムになっております。
浅川:この推進器なんですけれども、水を推進剤とした2種類の推進器を1つのシステムに統合したような推進系となっております。2種類と申し上げましたのが、1つ目が水蒸機を噴射するタイプのレジストジェットと呼んでいる推進器になります。もう1つが水蒸気ではなく水のプラズマ、イオンを噴射するタイプの推進器・イオンスラスタと呼ばれるものになっております。それぞれ特性・特徴が違うんですけれども、この特性・特徴の異なる2つの推進器を1つの推進システムとして統合したものが今回実証を計画しているKIR-Xと呼んでいるものになっております。寸法としましては、こちらお示ししている通り140mm×210mm×235mm、質量としては約5kgとなっております。3号機でも同様の水の統合推進システム・KIRというものの開発を行ってきておりました。この開発成果やノウハウを最大限生かしつつ、さらにその次に進めていきたいというところで、今回KIR-Xという実証テーマ名で開発・実証にチャレンジしていきたいなと思っております。
浅川:この3号機のKIRからの性能向上や更なる開発テーマに、チーム一丸となって取り組んでおります。で、この開発、非常に難航を極めたんですけれども、Pale Blueのチームメンバー一丸となって取り組んで今ここまで来ることができております。まずチームのメンバーに感謝したいなと思っております。また弊社だけではこの開発、ここまで来ることができなかったと思っております。JAXA様ももちろんですけれども、衛星システムを取りまとめていただいた三菱重工様、さらにはこのKIR-Xの開発に協力してくださった企業の方々のお力がなければここまで来られなかったと思っております。本当にありがとうございます。今後この打上げ、さらにその後の宇宙実証をしっかりと成功させるためにチーム一丸となって取り組んでいきたいと思います。以上になります。
TDS-PPT
髙橋:髙橋電機製作所の高橋でございます。私の方からは小型衛星用パルスプラズマスラスタ・TDS-PPTについてご説明させていただきます。弊社は人工衛星に搭載される電源コンポーネントの研究・開発から製造までを行ってる会社でございまして、今回、電気推進用の電源だけでなく推進部まで含めたコンポーネントの提供を目指して実証を目指しているものでございます。
髙橋:TDS-PPTのミッション概要といたしましては、今後ますます増えていくと思われる小型・超小型衛星向けにシンプルな構成の小型・軽量・低価格を実現可能な電気推進機の提供を目指しておりまして、その軌道実証・性能評価を実施するものになります。寸法・サイズ感としましてはキューブサット向け1U程度を目指しておりますけれども、今回軌道実証する衛星が100kg級ということで、推力をある程度大きくする必要がございました。ということで、このお示ししてるようなサイズ感ということになっております。共同実施者としましては山梨大学さんになりまして、性能評価等でご協力をいただいております。
髙橋:TDS-PPTの仕様としましては、1回あたりの噴射に対する推力、これインパルスビットと言いますが、これが約20μNと非常に小さいものでございます。その際の推進力、推進剤の消費量であるマスショットが1.8μgというもので、燃費に相当します比推力・ISPは1000秒を超えているものでございます。このヘッドを2つ搭載しておりまして、それぞれ1秒間に2回ずつ合計4回・4Hzで噴射するというようなパルスプラズマスラスタになっております。100kg級の衛星の姿勢変化を起こす程度の推力がこれで出ると思われておりまして、それで性能評価をする予定でございます。また推進剤としてPTFEという固体の推進剤を使用しておりますので、取り扱いの難易度が低くてなるのも特徴でございます。
髙橋:PPTにもいろいろな方式がありますけれども、今回実証で使うものは平行平板型と呼ばれるスラスタでございまして、PTFEを挟むようにカソード電極がありまして、ここに高電圧を印加してイグナイタで噴射トリガーを作って、推進剤であるPTFEを昇華させてプラズマ化して推進力を得るという構造のものでございます。このようなことで非常にシンプルでございます。PPT全体の構成としては、これに右側にありますキャパシタバンク、下部にあります電源・制御部で全体構成をなしております。このようにシンプルな構成ですので、他の電気推進機に比べて超小型衛星向きであるという風に考えておりまして、この実証を生かして電気推進及び電源コンポーネントの安定供給を加速してまいりたいと思っております。以上でTDS-PPTのご紹介終わらせていただきます。
D-SAIL
倉田:株式会社アクセルスペースの倉田と申します。よろしくお願いします。膜面展開型デオービット機構・D-SAILのご説明をさせて頂きます。実証テーマですが、小型衛星用の膜面展開型デオービット機構の軌道上実証となっております。提案機関である当社・アクセルスペースですが、小型人工衛星の設計・製造・運用を一貫して行う事業を展開しております。
倉田:ミッション概要ですが、運用終了後の衛星が軌道上に残存する期間をさらに低減するためのデオービット機構のシステム検証を行います。寸法資料については記載の通りです。本機はサカセ・アドテック株式会社様と共同開発しておりまして、大変いい機器が一緒に開発できたかなと思っておりまして、とても感謝しております。使用イメージをスライドの下方に示しております。D-SAILは衛星の運用終了後に膜面を展開しまして、軌道上に存在するわずかな空気を抵抗として利用して大気圏に突入させる装置になります。アクセルスペースは人工衛星の開発・製造から軌道上運用、廃棄まで地球と宇宙空間の環境に配慮する Green Spacecraft Standard という独自の指針を策定しておりまして、業界全体のサステナビリティの向上に積極的に貢献しております。本実証を経て今後当社が開発する汎用バスシステムにもD-SAILを標準搭載し、より効率的な効率的で持続可能な衛星運用を実現してまいりたいと考えております。
HELIOS-R
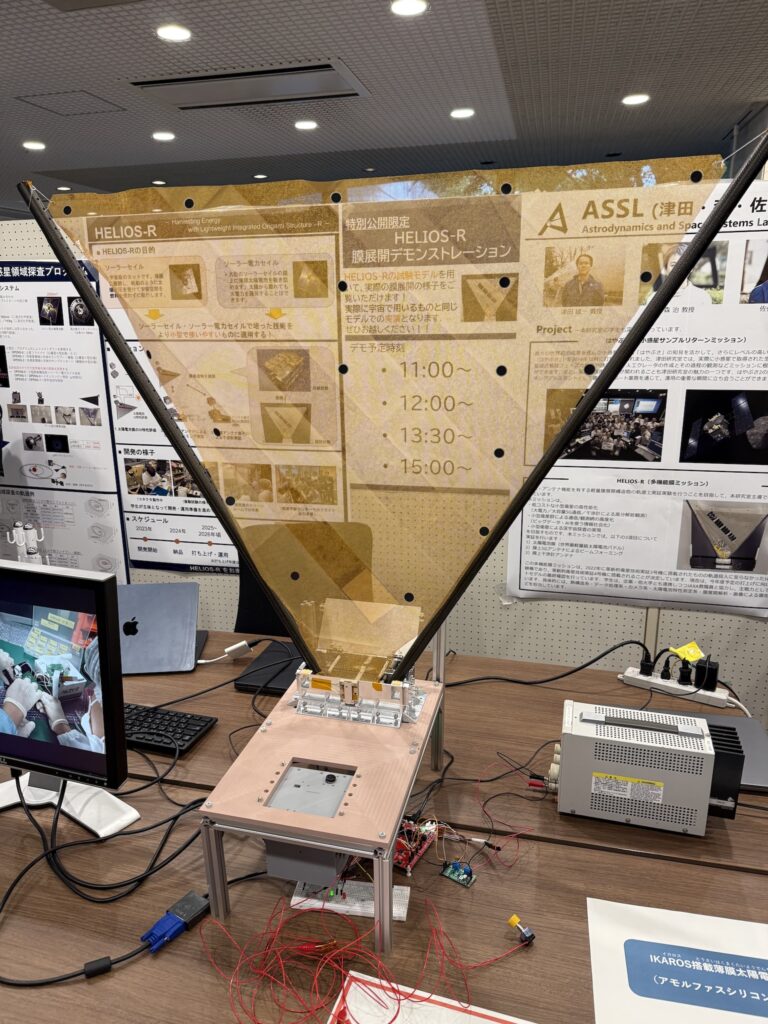
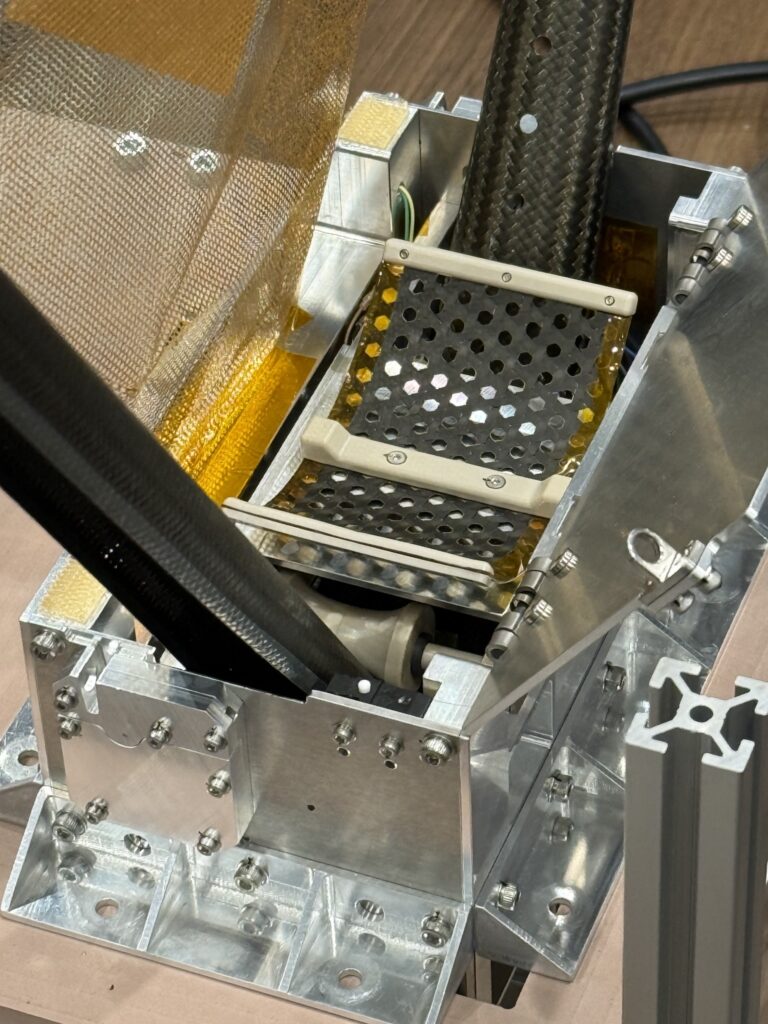
酒井:サカセ・アドテックの酒井と申します。本日は発電・アンテナ機能を有する軽量膜展開構造物・HELIOS-Rに関してご説明したいと思います。今、箱が2つ映っていますけれども、この箱の中から大きな膜展開構造物が展開して宇宙実証するという運びになっております。
酒井:実証テーマ名としてはSociety 5.0に向けた発電・アンテナ機能を有する軽量膜展開構造物の実証ということです。ミッション概要としては低コストな小型衛星の高性能・大電力・大容量5G通信、それから干渉計による高分解観測化に向け、発電・アンテナ機能を付与した軽量・高収納な膜構造物の軌道上実証を行うという風なことでございます。寸法は書いてある通りでございます。質量としては3kg以下、2.9kgとなっております。共同実施者としてはJAXAの宇宙研さん、それから東京科学大学さん、それと防衛大学校さんと私どもで4社(機関)で共同開発をやっております。
酒井:左側の写真は膜構造を宇宙空間で展開した時の写真でございますけども、まず薄膜太陽電池シートが12枚、膜面の上に乗っております。それから左側の上に5Gアンテナが乗っております。それから1番右下の方には干渉計アンテナが載ってるということでございます。ミッション概要としましては、まず太陽電池幕の実証として薄膜太陽電池を貼った膜展開構造物、2つ目としては、5Gミリ波アンテナによるビームフォーミング実証。これは展開膜の平面度がそれほど高精度ではないので、この5Gアンテナで補償する実証ということでございます。それから干渉計の実証に関しては、膜上の干渉計の5Gアンテナ搭載により、例えば小型衛星と非常に大きなアンテナの組み合わせが可能になっていく、という風なチャレンジでございます。
以下は2025年10月11日にJAXA相模原キャンパスの特別公開で展示されたHELIOS-R 膜展開デモンストレーションの様子
CF-CAM
野口:耐放射線地球観測カラーカメラ・CF-CAMにつきまして、マッハコーポレーションの方から説明させていただきます。実証テーマとしましては、次世代高性能CMOS撮像素子の軌道上実証というテーマにさせていただいております。この撮像素子はJAXAさんと共同研究開発したもので、非常に強い放射線でも壊れないという特徴を持っております。これは福島の廃炉処理も含めた各原発の方で使われておりまして、その他にもIAEAですね、国際原子力機関、こちらの方に納入の実績もございます。こういったカメラを作っておる会社でございます。
野口:このミッションの概要としましては、このカメラの開発及び将来の人工衛星にも搭載可能な高性能の撮像素子、CMOSを搭載して軌道上実証を行うということで、この撮像素子が宇宙にも耐える性能、耐放射線耐性を持っているということを実証するということで応募させていただいて採択していただきました。寸法はそこに書いてある通りで、将来の6Uの中の半分、3Uの中にも収めるということを意識したものでございます。質量としては2.45kgということでございます。右側にカメラの外観が載っていますけれども、左の方の望遠鏡で地球を見ます。右の方に小さな箱が付いてますけども、この中にJAXAさんと共同研究開発をしましたCMOS撮像素子、それから耐放射線の信号処理回路といったものを搭載してございます。今日後でご覧になっていただけると思うのですが、衛星の正面から見た時に上部中央部の黒くレンズの先端が見えておりますけども、ここに搭載される予定でございます。
AIRIS
山本:実証テーマ名は次代宇宙用MPUを活用したオンボードAI物体検知及び検知精度向上の軌道上実証というものになります。こちら、ミッション概要としまして大きく2つございます。1つ目が次世代宇宙用MPU、マイクロプロセッサユニットのことですが、こちらのSOISOC4という三菱重工が取りまめとなって開発したMPUがございまして、それの対宇宙環境性能を検証するというのが第1のミッションでございます。
山本:もう1つのミッションがオンボードAI物体検知でして、こちら特徴が2つございまして、こちら先ほど説明いたしましたSOISOC4とオンボードAIチップを用いて船舶を軌道上で検知するというところがございます。今まで画像データは地上に降ろしてから処理するということがメインだったんですけども、そちらを軌道上で検知しまして船等の場所が分かる、といったものが1つ目の特徴です。
山本:さらに2つ目の特徴としまして、必要なデータのみをダウンリンクしまして、その取得データを利用して地上で再学習しまして、それらを軌道上のオンボードAIチップにデータを上げましてAIを更新する、といったこの一連のサイクルですね。画像を撮りまして、軌道上で検知しまして、ダウンリンク、AI学習、それをまた上へアップデートする、といったことのサイクルが成立することを軌道実証するというものでございます。
山本:こちらに絵が3つ載ってございますが、皆さんが見て向かって右側、筒状のもの。こちらカメラでございまして、東京理科大学様の協力を得ましてこれを使っておりまして、サイズ的には、これぐらいですね。それで撮ったものをACAM-B、AIRISカメラボックスの略でございます、そちらを通しまして、左上の四角い立方体ですね、AMDP、AIRISミッションデータプロセッサの方に送りまして、こちらでAI処理等をするものでございます。質量としましては合わせて1600g未満に抑えるようにしてございます。簡単でございますがAIRISの説明は以上です。
質疑応答
打上げロケットがイプシロンSからElectronに変更された。苦重の決断だったと思うが率直な気持ちを(産経新聞・伊藤)
小松:今おっしゃっていただいた通り、我々もいろんなことを検討して決断いたしました。本来であれば国内の基幹ロケットを優先して打ち上げをしたいというような、元々プログラムがそういう方針でしたし、我々もそういうような判断をしたかったところですけれども、やはり今回のミッションは実証テーマであるお客様を載せて、その実証の意義・価値を最大限発揮するというところが一番の目的としてありました。それをなるべく早期に実現するということを考えた時、国内のロケットで打ち上げるというところを残念ながら断念せざるをえなかったということで、その中で最適な手段を検討した結果、今回の結論でありますElectronによる打上げを行う判断に至った、という経緯でございます。
感情の部分でやはり日本のロケットで打ち上げたかったのでは
小松:そうですね、ここは率直に言うと国内のロケットで打ち上げたい、というのが当初の計画としてもありましたし、プロジェクトチーム全員の思いとしては、そういう気持ちはありました。そういう意味で海外製のロケットに切り替えるというのは、ある意味残念な部分ではありますけども、ただミッションを成功させるというのが一番の目的だと思ってます。そのために最適な手段を選ぶということで、そこは気持ちを切り替えて一番いい選択をできたのではないかな、という風に私は思っております。
ロケットが変わることによる計画自体への影響、コスト的な影響は
小松:ロケットの変更が開発の終盤に入ってから発生しましたので、計画の変更をなるべく最小限に抑えるという方針でロケットの選定をしました。具体的に言いますと、なるべく衛星の設計を大幅に変更しないで、試験検証の部分だけで対応できるようにという方針で、主にそういう試験検証の変更だけで対応できるようなロケットを選定した。そういう趣旨で今回判断を行いました。そういう意味で、なるべく最短の計画変更のスケジュールインパクトで、年度内の打ち上げは実現できたのかな、という風に考えております。あとコストにつきましては、これはもちろんロケットが変わりますので多少の影響はありますけども、そこはJAXAの中で予算を調整しまして、その費用を捻出したというような状況でございます。
捻出したということはコストが上がったのか
小松:元々計画していたイプシロンからElectronに変わったということで多少の増減はあります。ロケットの打上げ費用だけではなくて、海外で打上げるということによる追加の費用等もありまして、多少の増減がありますけども、トータルとしては大きくは変わらないような額でできたのかな、という風に思っております。
13ヶ月間の実証の順番と、順番を調整するその背景みたいなものがあれば(フリーランス・秋山)
松浦:各実証テーマの軌道上実証ですけども、定常運用期間中、基本的には均等に実証機会を提供しております。ご質問いただいた通り、D-SAILさんですね、デオービットが実証テーマでございますので、そちらについては一番最後に実証の実験が行われるという予定になっております。
秋山:この順番で、というのは公開は難しいのか
松浦:その他の実証テーマの実験につきまして、均等に実験を行ってまいりますので、特に順番とか等は特になく、順不同というのが適切かあれですけども、均等に実験していくといったところになります。
秋山:準備が整ったところからというような
松浦:各実証テーマのチェックアウトっていったところは初期運用で実施してまいりますので、全て整ったところで、定常運用で各実験が行われていくという予定でございます。
イプシロンから踏襲された分離機構とは(宇宙作家クラブ・渡部)
松浦:分離機構そのものにつきましてはJAXA様の所掌になりますので、ちょっと詳細は私からは差し控えていただきますが、イプシロンと同一のインターフェースで準備いただいたという形となります。
小松:実績がある海外からの購入品の分離機構を、従来、イプシロンでも使う想定でして、それをそのままElectronでも使うというような計画です。
Electronの場合Lightbandがよく使われるが
小松:はい。Lightbandです。
小型衛星の放出機構もイプシロン向けのものをそのまま使うのか
小松:こちらはロケットの載せ替えに伴いまして放出機構のトレードオフを行いまして、こちらも実績を重視して確実な打上げをしたいというような考えもありまして、海外から実績品を購入してくるというような計画になっております。
イプシロンからElectronに変えた際の放熱面の見直しも、検証や試験の段階で修正できることなのか(日本経済新聞社・黒田)
松浦:そこは私の説明の順番が逆だったのでミスリードさせてしまったかと思いますが、投入軌道自体についてはElectronに変わる前、開発初期から決まっていたところでございます。そちらJAXA様のご要求に基づいて投入軌道が変わっているというところですので、Electronになったところで変わったものではございません。
私が革新的衛星技術実証で最も注目してるのは人材の育成という面。特に私が注目しているのは高専が作っているKOSEN-2Rという衛星で、前回革新3号が失敗した時に高専の学生たちがテレビに出て、私たちが次に打ち上げる頃にはもう卒業してしまう、と非常に残念そうだったのを覚えている。そういった人材育成という意味で、小松さんに学生や次の世代に向けて何かメッセージをお願いしたい(フリーランス・村沢)
小松:革新プログラムの大きな目標の1つに人材育成を掲げておりまして、今回も多くの大学ですとか高専、企業にこのプログラムに参加いただいて衛星を開発いただいています。私自身も大学時代に少し衛星の開発に携りましたけども、やはり学生時代にこういう物づくりをして、特に打上げを行って、自分の手で物を作って運用する、そういう経験は非常に重要、貴重な経験だと思います。もちろん学生さんなので2年、3年で卒業されてしまって、なかなかそういう技術が次の世代に引き継がれない、そういう課題もおそらくあるかと思いますけれども、その限られた期間の中で最大限、自分の持てる力を出して、この衛星を作り上げて打ち上げる。これはなかなかできない経験なのかな、と思ってます。是非こういった機会を活用していただいて、多くの学生の方に今後も引き続きですね、こういうプログラムを活用してチャレンジしていただきたいなという風に思っております。
応募の中から16テーマを選ぶ際、どの機関がどういう基準で選ぶのか(日経ビジネス・森)
小松:ちょっと申し訳ありません、具体的な数値は今手元にありませんが、採択された以上の公募の件数がございまして、そこから選定をしております。選定につきましては外部の有識者から構成される革新プログラムの調整委員会という委員会を設けております。委員の方も外部の、この業界における有識者複数名から構成されております。そういった方々が、その実証の意義価値、それから将来に向けた事業にいかにつなげていくか、それから技術的な実現性、そういった観点から多角的に評価をしまして採択する、そういった流れになっております。
技術として革新的であればそれがビジネスに結びつくかはあまり重要ではないのか
小松:技術的な観点以外に、将来に向けた意義・価値という意味でいかにその将来の事業あるいは先々の研究につながっていくか、そういった項目も評価基準になっております。
実証に参加する企業の皆さんは自分の実験以外にコストの負担はあるのか
小松:各機関の搭載機器や衛星の費用は各機関で負担いただくというような方針になっておりますので、今回ですと衛星の開発、搭載機器の開発費をそれぞれ負担いただいてるというような状況です。
それ以外はないのか
小松:はい。
4号機で検証される次世代CMOSは既にあるものを改めて宇宙で実証するのか、新しく作ったものを軌道上で検証するのか(マイナビテックプラス・庄司)
野口:今言われた分類でいいますと後者で、我々は最初に0.5メガピクセルという小さめのCMOS撮像素子、それからその2倍の面積を持った1Mピクセルという2種類を作りまして、0.5メガの方は各原発や放射線関係の開発機構とか、そういったところ向けをターゲットにしてまして、1Mの方はやはり将来の、もっと高精細の需要は必ずあるだろうと、かつ、それをカラーにしたんですね。それを今度は実際に軌道上実証をやって信頼性を確認しようと。
野口:元々実はスポンサーの福島県から補助金とかも頂いておりまして、そちらの方で航空宇宙産業を育成したいというご希望がありまして、それに答えるべく作ったというところもございます。福島県としてはそれによって雇用の促進といったものを図っていきたいということと、福島県は航空宇宙に熱心に取り組んでるんだということを示したいという要望がありまして、それを受けて我々このプロジェクトに応募したという経緯がございます。
このセンサーは静止画動画どちらもいけるものか
野口:普通の撮像素子ですので当然動画でも撮れます。30フレーム/秒、NTSCと言われてる、いわゆるブラウン管テレビから来てる規格に適合できるように、ということで動画も撮れますし、ワンショットずつ静止画として撮っていくということもできます。我々の信号処理装置の方では毎フレームパソコンの中に取り込んでおりますので、それを後から動画で見たり、区間ごとに区切って1フレームずつ見ていくとか、色んな用途に適用できるように設計されております。
将来どういうビジネスに役立つのか一言ずつ(話者不明)
LEOMI (NTT・山下):今、宇宙空間ではかなり大容量のデータを使うようになっていますので、それを地上に持ってくるっていうところで通信は、なるべく太く大容量にしていきたいという要望は出てくると思いますので、そういうところに使えるんじゃないかなと思っております。
GEMINI (三菱電機・千葉):先ほどの中で地球観測衛星という風な例も示しましたけれども、LEOですね、低軌道の周回衛星の画像処理だとか、そういったところにまず使いたいと考えていますし、あの画像処理だとか、輸送系ですね、当社は輸送系のプロジェクトやらせていただいてますし、月関係もやらせていただいてるんですけども、そういったところの近傍通信系ですとか、接近系のところに関して、GPUですとか高度な処理といったところは今後ますます必要だと思われていますので、そういったところに生かして参りたいという風に考えてます。
またAIの処理とも含めますと、何か特定のというよりは、いろんなアプリケーションに使われるのでないかという風に考えてございますので、今はいろんなサービス、アイデアがある中で、まずはその地球観測系ですとか輸送系に対して考えてまいりたいという風に考えております。
KIR-X (PaleBlue・浅川):今、低軌道だったりで地球観測や通信の衛星コンスレーションビジネスが盛り上がりを見せる中でですね、ビジネスをより拡大していくためには軌道投入だったり軌道修正といった機能を求めれているかなと思っています。また、宇宙空間で衛星の利活用が盛んになっていきますとスペースデブリの抑制というのも非常に重要なポイントになってくるかなと思っています。その文脈でいきますと軌道の離脱だったり衝突回避、こういった機能が衛星にとって必要になってくるかな、と思っています。
そういったニーズに対して、我々が開発するような、今回実証を目指していく推進器は貢献できていけるんじゃないかなと思っています。かつ、大量の小型衛星が使われるようになってくると、その推進器に対しても今後取扱性だったり入手性だったり、コストだったり、そういった観点がより求められてくるんじゃないかと思っております。そこに対して我々の水を使った推進器は貢献していくことができるんじゃないかなと考えております。
TDS-PPT (高橋電機製作所・高橋):今PaleBlueさんからお話がありました通り、電気推進器に関して言いますと、これからコンステレーションを組むような衛星が増えていく中で、軌道上で推進力を欲しいという衛星メーカーさんがたくさん出てきております。現状ですと海外から買ってくるという選択肢もちろんあるんですけれども、国内で安定供給できていない、というところもございますので、そういった観点で国内メーカーとしてコンポーネントを供給していきたい。
また我々電気推進器だけでなく電源コンポーネントも開発をしておりまして、そちらへの応用も考えております。特に電源コンポーネントもやはり海外メーカーさんから購入されている衛星メーカーさんが非常に増えてきておりますので、こういったところで国内で技術的なサポートをしながら供給していくというメリットは出てくるんではないかと思っております。
D-SAIL (アクセルスペース・倉田):近年、軌道上に多数の衛星を配置して事業を行うコンステレーションというものが活発化しております。さらに従来とは比べ物にならないような多数の機数を配置するようなメガコンテレーションと呼ばれるようなものも出てきております。また当社もやはりコンステレーションを構成して現在も運用しておりますし、今後も機数を増やしていく予定もしておりますので、このような中で軌道上の環境、デブリ問題や環境維持というのは事業者として避けては通れない責任だと思っておりますので、今回実証するD-SAILを今後も活用して、運用が終わったら早く地球の大気圏に再突させるというところを、今後も徹底して標準化してやっていって、これからも地球軌道上環境のサステナビリティに貢献していきたいと考えております。
HELIOS-R (サカセ・アドテック・酒井):実は今隣にいらっしゃるアクセルスペースさんのデオービット機構の標準品として搭載いただけるということで、ひとつ事業化の目処が立っているのかなと思っております。大変ありがたく思っております。それからもう1つご案内しました発電ミッションですね。これはむしろプロジェクトの方が先に行っちゃってまして、1つは月探査関係で、JAXA、トヨタさんの与圧ローバーですね、あれの発電、電力供給ということで、これも来年度ぐらいからEMのフェーズに入ってくかなと思っております。
それからもう1つは、宇宙研さんの方のミッションで、土星探査ミッションですね。太陽から土星になりますと相当遠いんで、どうしてもああいう大きな膜面を広げて発電しないと必要な電力量は賄えないということで、深宇宙探査、月探査含めて事業化の目処はもう立っていて、これからはEMやFMの開発に入っていくと、こんなようなステージでございます。
CF-CAM (マッハコーポレーション・野口):実はもうすでに次のステップをいろいろ考えておりまして、まず1つは今カラーカメラなんですけども、これはRGBという光の3元色しか使っておりません。これをさらに分割して、8バンド、それからさらにその上を行くハイパースペクトルバンド、そういったフィルターを使ってそれを撮像素子の上に載っけてですね、それで将来は日本の安全保障ですとか災害監視、そういったものの方に使えないかと。
その時には当然小型衛星に載せるという形になるんですが、先ほどもちょっと言いましたように、うちのカメラは3Uには適合しますので、残りの3Uのところに電源系・姿勢系・通信系などを置いてもらうと一応6Uで作れるという風に考えておりまして、既にJAXAさん主催されますCubeSatサロン、こちらの方に3回ほどお邪魔しまして、そちらの専門の先生に色々相談してですね、使う時の条件ですとか、打上げどうするか、運用どうするか、そういったところも色々と話をさせて頂いております。いくつかの会社さんからも、いろんな引き合いが来だしているという風な状況です。
AIRIS (三菱重工・山本):我々が提案するAIRISというものなんですけども、一例としまして不審船の検知となると思っています。基本的に大きな船というのはAISと言って自分が何者で、何をしてるというのを電波で出して知らせるという義務があるんですけども、当然違法な運用している船というのは出していないのでで、我々のAIRISのようなもので洋上を監視して、AISが出ていないけど船がいるぞ、と分かると、それでここに不審船がいますね、っていう、そういうことはできるのかなという風に思っています。