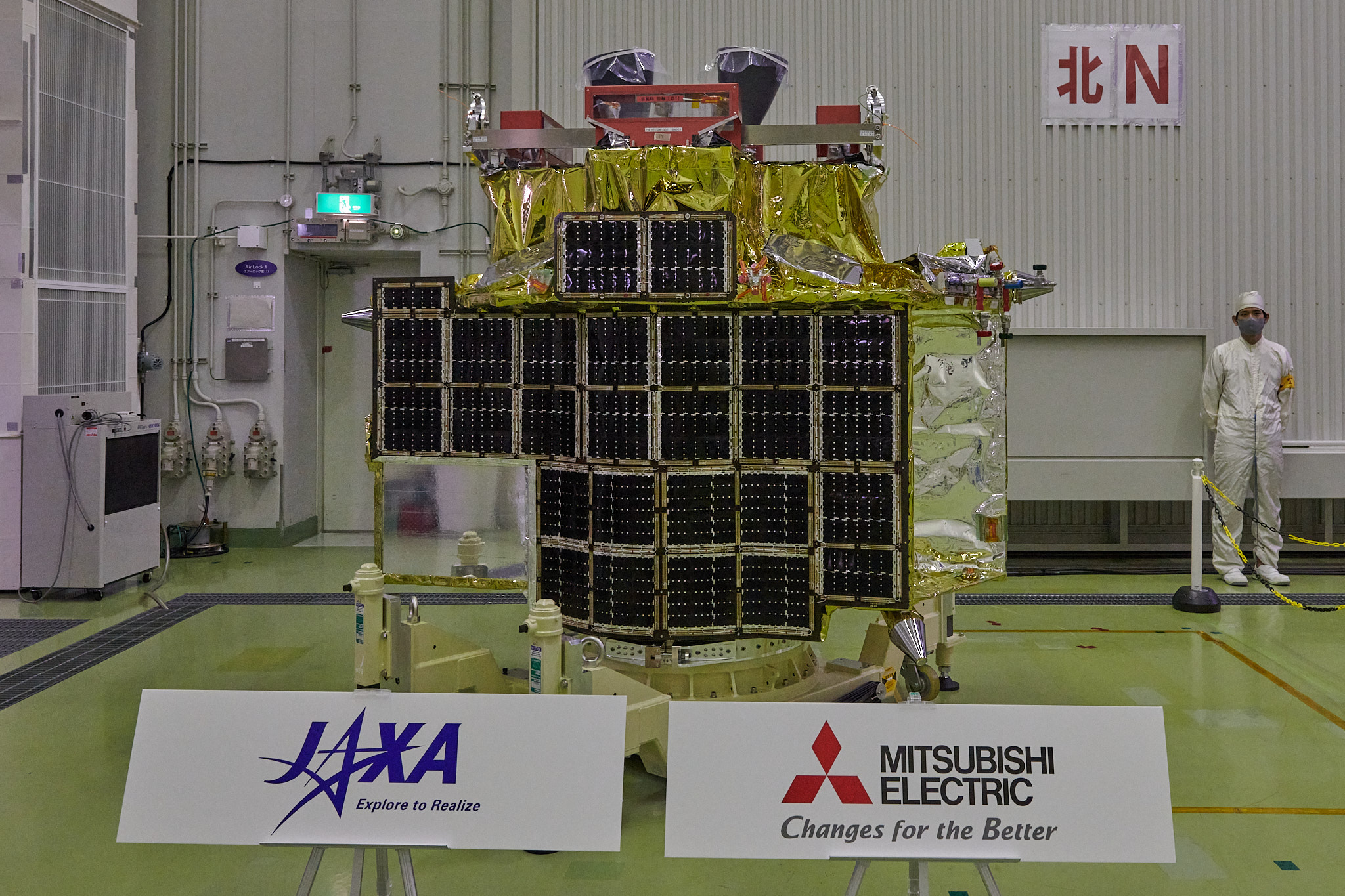
小型月着陸実証機SLIM機体公開
2023年6月4日、種子島宇宙センターにて小型月着陸実証機SLIMの機体公開および記者説明会が行われました。(以下・敬称略)
登壇者:JAXA 宇宙科学研究所宇宙機応用工学研究系教授/小型月着陸実証機(SLIM)プロジェクトチームプロジェクトマネージャ 坂井真一郎
ピンポイント着陸技術について

アポロをはじめとした各国の月着陸機の着陸精度は数キロ~十数キロメートルの範囲だったが、JAXAの「かぐや」やNASAのLROといった月周回機から得られた非常に高精細な月面データを元に月での活動を計画していく上で、月着陸精度も向上していく必要があると考える。
たとえばサイエンスとして興味深い着陸点候補エリアの一つでは、フレッシュなクレーターから出てきた岩石を研究する為に、アポロ等が降りてきた「海」と呼ばれる領域に比べると比較的複雑な地形に高い精度で降りないと安全に着陸することすら出来ない。また最近議論されている月極域での水資源探査では、太陽が横から当たるので地形の具合によって1年365日24時間ずっと日が当たる永久日照や全く日の当たらない永久凍土が存在する。このような場所で水資源探査を行うには永久凍土の隣にある永久日照に降りて探査がしたいが、この場合も100m程度の高い着陸精度が求められる。
このピンポイント着陸の技術実証として始まったのがSLIMプロジェクト。「はやぶさ」「はやぶさ2」の小惑星着陸に比べて月は重力が桁違いなので降りるアプローチも変える必要がある。たとえば「はやぶさ2」では小惑星表面近くからリハーサルを兼ねた降下を行い様子を見た上でホームポジションに戻るということも出来たが、月の場合はほぼ不可能。SLIMの場合、最終的に降下を決定してから20~30分で着陸を行うことになる。
SLIMミッションの目的
SLIMミッションでは大きく二つの目標がある。一つは月へのピンポイント着陸(高精度着陸技術)の実証で、キーとなる技術は「画像照合航法」および「自律的な航法誘導制御」。もう一つは小型・軽量なコンポーネントやシステムを用いた「軽量な月惑星探査機システムを実現し、月惑星探査の高頻度化に貢献」。
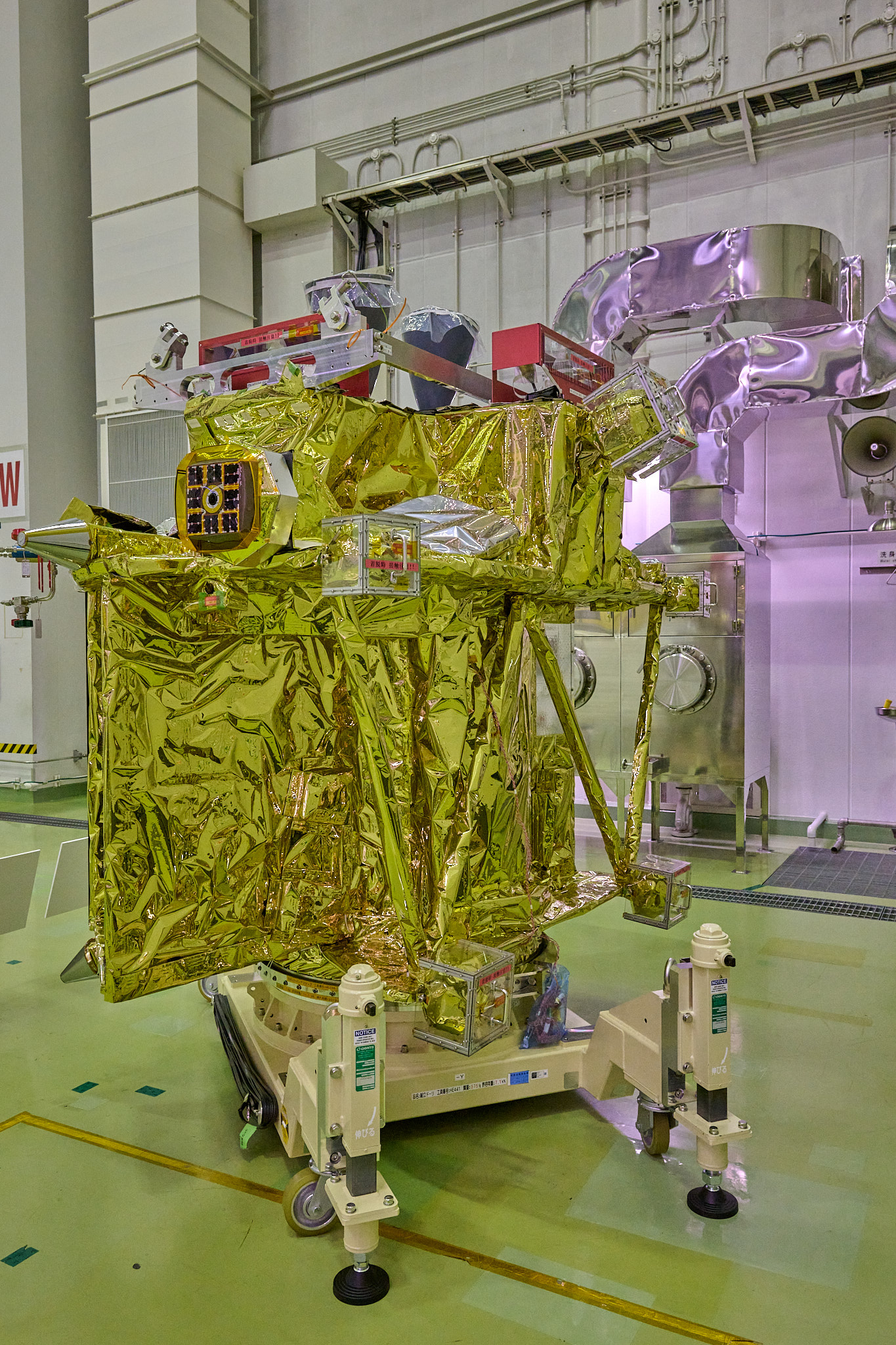
SLIM探査機外観および搭載機器
構体
通常の人工衛星等に比べて少し変わった形だが、これは小型・軽量化と関係する。たとえば月に向かい着陸するミッションなので非常に多くの推進薬を必要とするが、大きなタンクを構体に納めるのではなく、大きくて丈夫なタンクに着陸に必要な機器やセンサ等を「ぺたぺたくっつける」ことで構体にあまり質量を割かずに済む。
推進系
メインエンジン(OME)はセラミックス燃焼器を備えた「あかつき」搭載スラスタをルーツにもつ国産500Nスラスタ。また燃料と酸化剤は隔壁で分けた一つのタンクに収めることで小型軽量化を図っている。
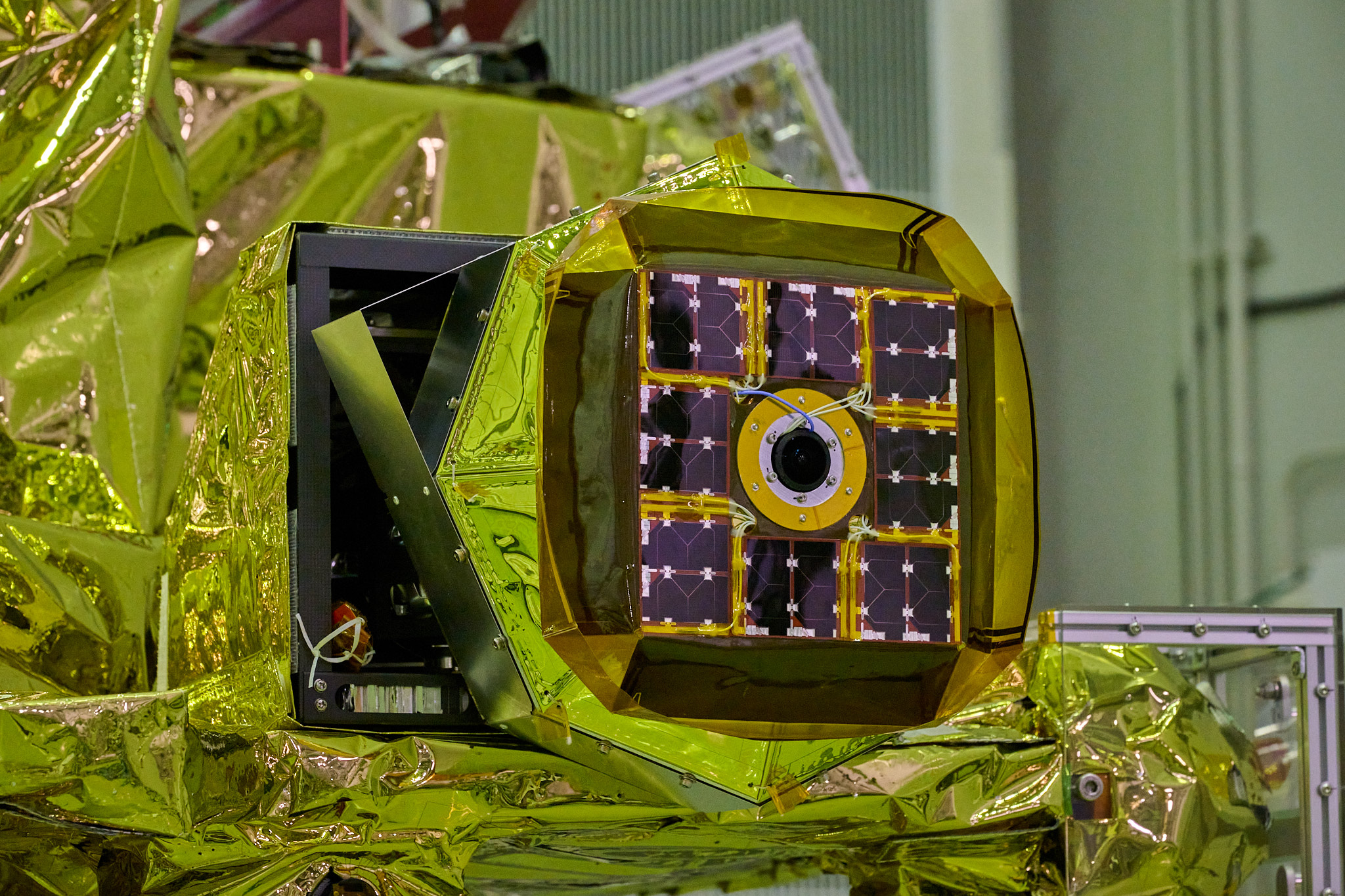
統合化制御系(ISC)
統合化制御系はピンポイントな軟着陸を行う際にSLIMの目となるセンサたち。着陸レーダーは電波を用いて高度数キロメートルから数十メートルの距離と月面相対速度を計測する。画像照合で自分自身の位置を正確に把握する為の小型の航法カメラは異なる箇所に二つ搭載されている。着陸最後に用いられる距離計としてレーザーレンジファインダーを搭載。また各種データ処理から着陸誘導の演算まで行う統合化計算機はSLIM唯一の搭載計算機(これも小型軽量化の為)。
通信系
Sバンドのトランスポンダは小型軽量化の為にフルデジタルを採用している。
電源系
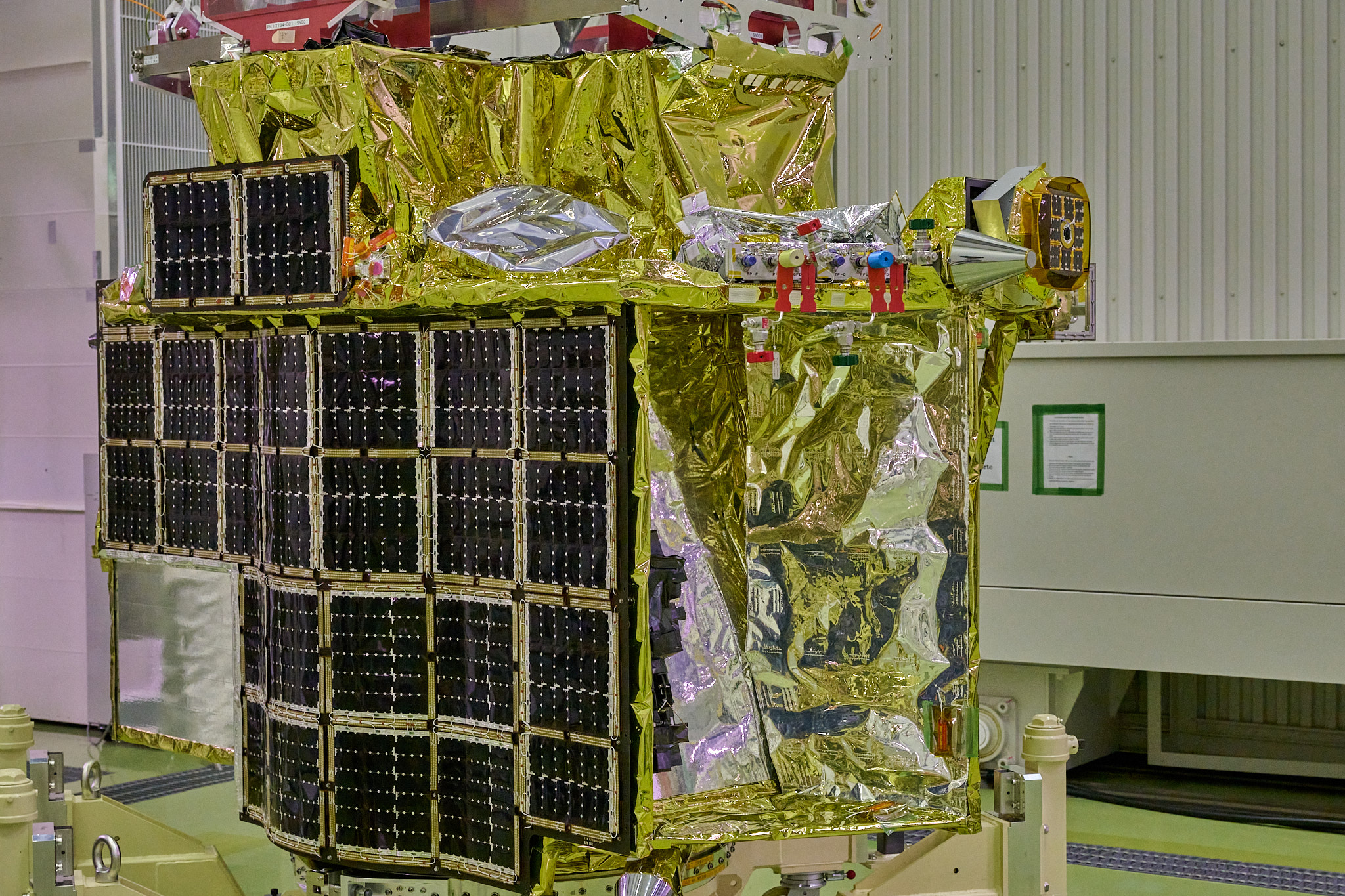
小型軽量化の為、ケースにSUSを用いたSUSラミネート電池を採用、また太陽電池には薄膜太陽電池を採用し、ベルクロで取り付けている。電源制御を行う電力制御分配機(IPCU)もデジタル制御により小型軽量化を図っている。
衝撃吸収系
アポロでは脚の関節で衝撃のエネルギーを吸収していたが、SLIMではで中がスカスカの金属の塊が潰れることで衝撃を吸収して着陸時の機体破損を防いでいる。この衝撃吸収材(ABS)は3Dプリンターを用いた三次元積層造形を用いることで内部構造の再現性を高精度に実現可能となった。
月面活動系

科学観測を行うための分光カメラを搭載、また表面移動技術の実証を行う2つの小型プローブ(LEV)では、うまくいけば着陸後のSLIMの様子をカメラで撮影することも目論んでいる
SLIMの打上げ手段
SLIMはX線分光撮像衛星XRISMと一緒にH-IIAロケットで打ち上げられ長楕円軌道に投入後、自身の推進系で月へ向かうが、太陽潮汐力や月スイングバイを利用した軌道変更を行うことで(時間をかけてやや遠回りすることになるが)推進薬消費量を減らしている。
打上げから月周回軌道到着まで3~4か月、月周回に約1か月を要するので、打上げから月着陸降下まで4~6か月かかる見通し。
着陸シーケンス
近月点約15kmの月周回軌道から降下を開始。航法カメラで撮影した月の画像から何回か画像照合を行い、自身の位置を正確に把握しながら目標地点に接近する。画像照合により得られた位置を元に軌道を補正しつつ、OMEを減速方向にフルパワーで吹くことで、降下開始時秒速1~2キロメートルあった速度を徐々に落としていく。
着陸目標地点上空では高度も下がっているので着陸レーダーを併用しながら月面へ降りていく。最後、高度50mあたりで撮影した画像から安全な場所を探し出す自律的な障害物回避を行いながら着陸する。
画像照合航法
画像照合航法では2段階の処理を行う。まず撮影した月面画像からクレーターを抽出し、SLIMに搭載されたクレーターの地図とのパターンマッチングを行い探査機が自動的に判断。一般的に画像処理は非常に多くの能力が必要とされるが、宇宙機で使える計算機は地上用に比べて概ね1/100程度の能力しか無い。制御で用いるにはほぼリアルタイム(1~2秒)で処理を行う必要があるが、このアルゴリズムを各大学と一緒に長年研究することでこの画像照合航法を実現した。
月面活動ミッションの実証
SLIMの大きな目標としてはピンポイント着陸の技術実証だが、着陸成功後は分光カメラで月マントル由来の岩石の組成分析を行う。この岩石のある場所は限られているがおおよそ判明しているので、その為にもピンポイント着陸の実現が必要。この月マントル由来の岩石を分析することで、月マントルの成分と地球の成分を比べ、両者が似ていれば月は地球由来、似ていない場合は外からもたらされたと判断することが出来る。
LEV1およびLEV2(SORA-Q)、二つの小型プローブは自律的に月表面を移動し、うまくいけばSLIMの着陸状況などを撮影することが出来るとかもしれない。これらの小型プローブによる撮像データ等の通信は、SLIMを経由するのではなくLEV1から直接、もしくはLEV1を介して行う。
着陸目標地点の選定
分光カメラによるマントル由来の岩石の成分分析に適した場所をサイエンスのチームと議論を重ねた結果、「神酒の海」近傍のSHIOLIクレーター近傍を着陸目標地点として選定。この場所は残念ながら平坦な場所ではなく平均斜度15度の斜面。この斜面に安全に降りる方法を検討した結果、主脚で接地してから機体を倒す2段階着陸方式となった。

JAXA月惑星探査の中での位置づけ
SLIMが実現しようとしているピンポイント着陸技術、小型軽量化技術は現在検討されれている月ゲートウェイ等月に関係する数々のミッションにつながっていくと考える。また月に限らず、火星衛星探査・MMXでも使われているところがある。
質疑応答
- SLIM一番のポイントはピンポイント着陸だと思うが、成功した場合、世界にどの程度インパクトを与えられるのか(日本経済新聞)
- 各国様々な月着陸機が検討され、我々も注視しているが、公になっているだけでもアメリカの民間企業では2号機で高精度ピンポイント着陸を公表している。ピンポイント着陸の重要性に皆気づき始めていて、まさにやろうとしているところだと考えている。現在我々が把握している限りでは予定通りいけばSLIMが世界初になる。(坂井)
- 着陸地点の場所、クレーターの内側なのか外側なのか(共同通信)
- 月の赤道面よりも少し南側にあるSHIOLIクレーターの外側。斜面はクレーターの裾野にあたる部分。(坂井)
- 画像照合航法は事前にインプットした場所と撮影画像を照らし合わせるイメージなのか(共同通信)
- 概ねその通りだが、画像照合前はこれまで同様地上からアンテナ等を使って探査機の場所を決め、どういう軌道を飛んでいるのか教えてあげる。これにより最初に撮像する場所をどのくらいで通過するのかわかるので、そのタイミングにあわせて最初の1枚目を撮像し、自分自身の精確な位置をアップデートし、その先を続けていく。
- 照らし合わせる情報は画像ではなく、クレーターの位置を搭載しておき、これと照合する。(坂井)
- 従来からどの程度小型化・軽量化されたのか(読売新聞)
- ミッションの目的等により変わるので着陸精度と異なり答えにくいが、SLIMに匹敵する小型・軽量な月着陸機は無かったと思う。
- SLIMは推進薬が入った状態で700キログラムから700キログラム強、最後推薬が空になった状態では大体200キログラムくらい。サイズ感としては小型の自動車くらい。(坂井)
- 着陸成功後に分光観測・小型プローブを行うタイミング(NHK)
- 小型プローブ分離はSLIM着陸前、高度2メートル程度のところで2つの小型プローブを分離する。
- LEV2はバッテリーが尽きるまでなので数十分~2時間程度、LEV1は太陽電池セルも搭載しているので一次電池が尽きるまでとはならないが、それほど長い活動時間ではないと考えられる。
- 分光カメラによる観測は熱環境次第。月表面は太陽が当たると非常に熱くなるので温度がどの程度上昇して、どの程度機能がもつかが勝負となるので、分光カメラで観測を行える期間は数日と考えられる。
- 月表面は日向で100度を超えるので、そこに向けて探査機の温度が上がる中で、機器の温度もどこで上限に達するか見合いになる。(坂井)

