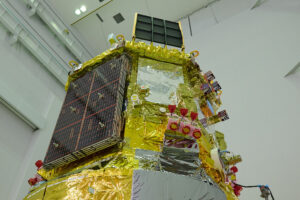
新型宇宙ステーション補給機(HTV-X)1号機機体公開(後編)
以下は機体公開直前に行われた記者説明会の書き起こしです。前編(機体公開の様子)はこちら。
第一部
登壇者(以下敬称略)
- JAXA 有人宇宙技術部門 新型宇宙ステーション補給機プロジェクトチーム プロジェクトマネージャ
伊藤 徳政(いとう のりまさ) - 三菱重工業株式会社 防衛・宇宙セグメント 宇宙事業部 技術部 主席プロジェクト統括(ISS・宇宙探査プロジェクト)
藤原 哲(ふじわら さとし) - 三菱電機株式会社 鎌倉製作所 宇宙インフラシステム部次長 兼 HTV-X プロジェクト統括
鵜川 晋一(うかわ しんいち)

伊藤:HTVXは国際宇宙ステーション(ISS)の活動を支え、未来につながる宇宙機として開発を進めてまいりました。2009年から2020年まで9機連続してISSに物資を運んで成功させた「こうのとり」・HTVの後継機としてHTV-Xは位置づけられております。輸送能力や運用性を向上させ、更には将来の様々なミッションに対応可能なシステムとしております。
伊藤:ひとつ例をご紹介させていただきますと、こちらにある図ですけども、左側がHTV、右側がHTV-Xのロケットに搭載された状態ですけども、このフェアリング上部に大きな空間がありますので、より大きなカーゴが搭載できるというのがひとつ大きな特徴。また、電源の供給等が可能になっている、打ち上げの24時間前までの物資の搭載が可能になっている、といったユーザーサービスの向上も行っております。
伊藤:もうひとつの特徴ですけども、HTVではISSから離脱した後、3日ほどで太平洋上空で再突入して燃い尽すぎるんですけども、HTV-Xの場合は再突入する前、条件によりますけども最長1年半ほど軌道上で、いわゆる衛星バス系の軌道上の実証を行うプラットフォームとして活用することができ、新たな技術の実験が可能となっております。また、ISS退役後の地球低軌道での有人活動、将来の探査ミッションへの応用が可能なシステムを検討しているところです。
伊藤:ミッションの目的は2つあります。1つ目が、ISSのへの物資輸送の強化。「こうのとり」の後継機として輸送能力を生かし、ISS存続に欠かせない機器や実験装置、宇宙飛行士の生活を支える食料・水・衣類等の物資を届けて、ISSの利用・運用の維持拡大に貢献すること。2つ目が将来に向けたコア技術の獲得です。プラットフォームとして活用し、新たな技術の実証を行うこと。さらにはポストISSを担う商業宇宙ステーションやゲートウェイ、月周回軌道への物資輸送に活用することも検討をしております。目的が2つありますので、私は個人的には「二刀流の輸送機」と呼んでおります。
伊藤:機体の特徴ですけども、HTVでは太陽電池は構体にボディマウントしておりましたけども、HTV-Xでは電力の増強を計るために展開型の太陽電池パドルを採用しておりまして、そのため展開後の全幅は18mとなっております。それが大きな特徴。それから全長とか直径、それから打上げ時のカーゴを含んだ質量はHTVとほぼ同じもの。大きく変わっておりません。ただ、与圧カーゴと曝露カーゴ、技術実証ミッションの合計質量が約6tになりまして、HTVの約1.5倍の搭載能力を備えております。
伊藤:それからISS離脱後の運用期間は条件によりますけども最長1.5年、というのは先ほどご説明いたしました。1つ特徴といたしまして、この図の右側の図の真ん中にありますスラスタなんですけども、HTVXではこのサービスモジュールというところの真ん中ぐらいに集約しております。これが1つ大きな特徴です。
伊藤:こちらのページでは、右下の図で右側が「こうのとり(HTV)」、左側がHTV-Xの比較をしたものですけども、与圧モジュールにつきましてはHTVの与圧部をほぼ流用しており、電源の供給等の新しい機能を付加しております。2つ目はサービスモジュールですけども、これは他の機能を集約して1つのモジュールに集約しております。先ほど申し上げましたスラスタにつきましては、あのHTVにおいて黒い三角で示してあるように与圧部ですとか推進モジュール、それから1番下のところ分散しておりましたものを、HTV-Xでは真ん中のサービスモジュールに集約しております。そのため、サービスモジュール本体上側に曝露カーゴ搭載部というものを設置しておりますけども、ここの空間が大きく利用できると、大きな装置を搭載できるというのが1つ大きな特徴になっております。サービスモジュール、与圧モジュール、機能を集約したことにより、両モジュールとも将来は単独で使用が可能となっております。
伊藤:これまで申し上げました通り、HTVに比べて輸送能力が1.5倍になっていること。それから真ん中の図の、比較してある図のピンクのところですけども、大型のカーゴが搭載できること。それから1番右側の図ですけども、打上げのより近い時期にカーゴの引き渡しが可能となっております。つまり、締め切りを伸ばして、ユーザーにとってユーザーフレンドリーな輸送機となっております。
伊藤:それから、将来宇宙技術へつがる技術の獲得として、例えば、HTVでもHTV-Xでも最終的には宇宙飛行士がロボットアームで掴んでステーションに結合するんですけども、最後まで完全自動で結合することが可能な自動ドッキング技術の開発も進めているところです。
伊藤:1号機が運ぶ物資についてご説明いたします。曝露カーゴにつきましてはすでにHTV-Xに搭載済みです。与圧カーゴにつきましては、まだ全てが具体的に決定されていませんので、与圧モジュールには搭載されていない。候補としてはある。曝露カーゴにつきましては、移設設置される中型曝露実験アダプター・i-SEEPというものを曝露カーゴ搭載部にすでに搭載済みです。与圧モジュールに搭載するカーゴにつきましては、JAXAが開発して将来の友人活動に役立てる、二酸化炭素除去システムの軌道上実験装置、それから生鮮食品、民間の「きぼう」利用機材、それからNASAが準備いたします空気・水・食料等のものを今後決定して搭載する予定としております。
(HTV-Xミッション概要のビデオ再生)
伊藤:ロケットからHTV-Xが分離された状況、打ち上げから約15分ほどを予定しておりますけども、分離後すぐに太陽電池パドルを展開いたします。先ほど申しました通り、ボディマウントだったHTVに比べまして、この展開型の太陽電池パドルにすることによって約1.5倍の電力を発生することが可能となっております。大体打ち上げ後3日乃至4日ほどでISSに近づいて、最終的にはISSの下、約10mで相対的に停止する形になります。そこで、ISSにいる宇宙飛行士がロボットアーム、こちらに白いロボットアームが見えておりますけども、これでHTV-Xを捉まえてISSに結合。与圧モジュールの方にありますハッチを開けて、そこから宇宙飛行士が与圧モジュールの中に入りまして物資をISSに輸送する、乃至はISSにあった廃棄物をHDV-Xに搭載する、という作業を行います。
伊藤:引き続いて技術実証ミッションの1号機の技術実証ミッションの紹介をさせていただきます。HTVではISSを離脱後3日ほどで再突入して燃え尽きますけども、HTV-Xでは燃え尽きる前に、この図で言うところのDのフェーズですね、技術ミッションフェーズというところで、条件によりますけども最大1.5年の技術実証を行うことが可能です。1号機では3つの実証を予定しておりまして、1つ目は1番左にありあります超小型衛星放出機構(H-SSOD)から日本大学の学生さんが開発しました「てんこう」という超小型衛星を放出する予定です。
伊藤:2つ目がJAXA追跡ネットワーク技術センターが開発しました「Mt.Fuji」というレーザーリフレクターを搭載します。地上からHTV-Xに搭載したMt.Fujiにレーザーを照射して、反射してくる光を観測、距離と姿勢を測定しますが、HTV-Xの姿勢データと照合することによって、このMt.Fujiのデータの妥当性を確認でき、将来の宇宙デブリの観測の活用に目処をつける計画としております。
伊藤:3つ目、1番右側ですけども、JAXAの研究開発部門が開発いたしました軽量平面アンテナの展開の軌道上実証を行うDELIGHT、それから次世代の宇宙用の太陽電池セルの実証を行うSDXというものを搭載する予定としております。これは起動上の運用を示したものですけども、1番最初に衛星の寿命が伸びるように高度を100kmほど高くしてから超小型衛星を放出、Mt.Fujiの実験を行いまして、最終的にDELIGHT/SDXの運用を行いまして離脱後約3ヶ月の期間運用する予定としております。これらの実験では、他のプラットフォームにはない、HTV-Xの特徴であります、高度を上げる、変更できる、それから姿勢を変更できる、大型のアンテナを展開できるという特徴を活用してるものであります。(ミッション紹介ビデオを再生しながら)ISSから離脱後、高度を100kmほど上昇させまして、1番最初に日大の学生さんが開発されました「てんこう2」という超小型衛星を放出します。続いてMt.Fujiというレーザーリフレクターにつきましては、地上からレーザー光を照射、反射してくるレーザー光を測定することによって距離・姿勢について計測できます。続いてDELIGHT、これは展開アンテナですけども軌動上で展開させる。畳4枚分、2m×4mほどの要素的なアンテナを展開させる、将来的には30mほどの展開アンテナになることを想定してしています。
伊藤:引き続いて運用の準備状況を説明いたします。このページは2017年プロジェクトが発足してから約7年半の開発の例を集めた写真集です。1つ1つは説明いたしませんがご覧いただければと思います。次のページをお願いします。これはあの各社の工場から種子島宇宙センターにコンテナで輸送した状況を写真で納めてありますけども、左側が与圧モジュール、右側がサービスモジュール。それぞれコンテナで運んで種子島宇宙センターに輸送。現在はコンテナから出して全機結合して機能試験を実施中というところです。
伊藤:運用の準備状況ですけども、運用はつくば宇宙センターで、運用管制室と運用システム共に既に完成させております。運用体制は打ち上げ後3日から4日ぐらい24時間体制・3シフトで運用を行います。総勢約160名ほどでNASAも含めた合同訓練を約60回、既に8割ほど済ませております。運用時はヒューストンにありますNASAのジョンソン宇宙センターのメンバーと協力をして運用を行うこととしております。
藤原:機体システムの状況をメーカー側からご紹介させていただきます。まず最初、与圧モジュールについて三菱重工からご説明いたします。プレッシャライズドモジュール(PM)ということで説明中PMと呼ぶかもしれません。ご承知おきください。与圧モジュールの特徴は4点あります。
藤原:左上からですが、1つ目として「こうのとり」を引き継ぐ輸送能力ということで、「こうのとり」と同じサイズのハッチを採用しております。右の図の1番下の部分ですね、ここをハッチと言ってます。宇宙飛行士が入るところです。ここが大型ということで、大型ラックは世界で唯一、HTV-Xのみが搭載・排棄できるという能力を維持しております。
藤原:2つ目です。環境制御系、電力制御の刷新ということで、電源供給ですとか運用制御を行う制御装置を高度化しております。環境制御系については、飛行中も作動させるということで、空調が必要なカーゴにも対応できるとことで能力を向上しております。また、3D造形を使いました最新の技術というのも取り組んでおります。
藤原:続きまして3つ目です。カーゴ向け給電機能の追加ということで、冷凍庫なども対応できるようにしております。これによりまして「こうのとり」よりも幅広いユーザーに対応できる形態になっております。4つ目です。レイトアクセス能力の向上ということで、打ち上げ直前にカーゴを搭載するレイトアクセスの向上を図っております。搭載に用る治工具ですとか装置運用手順の見直しということを行いまして、打ち上げの1日前、24時間前に搭載できるとところを目指して開発を行っております。
藤原:ここから少し写真を交えまして、開発状況、ハードウェアをご紹介いたしますと、まず4点、開発試験をご紹介いたします。1つ目です。PAFアダプターの強度試験ということで、与圧モジュールの1番下の部分にロケットとの結合部分がございます。そこの強度試験を行いました。ここの部分は打上げ時にHTV-Xの全荷重が入るというところで、十分な強度を有してることを確認行いました。続いて右側です。給電カーゴ噛み合わせ試験ということ、先ほど申しました給電カーゴを搭載できるという能力を実際示すということで、NASAの代表的なカーゴを借りまして、つくば宇宙センターで電気的な噛み合わせ試験を行っております。3つ目です。クルーインターフェース確認試験ということで、宇宙飛行士が与圧モジュールの中で作業を行います。機器の操作も行うということで、事前に宇宙飛行士ですとか専門家の事前レビューを受けるということが必要になっております。弊社の工場ですとか、つくば宇宙センター、それから射場にて、事前の確認ということで、危険な部分がないか、危器の操作性といったところを確認いただいております。それから4つ目です。レイトアクセス、ここは実際に設計だけでは分からないところもありまして、実際の作業性を、1号機のハードウェアといろんな装置類を使いまして実際にデモンストレーションを行いまして、想定時間内にやれるかというところの確認を行っております。
藤原:ここから2ページに渡りまして、少しハードウェアの紹介をいたします。左上、全体組み立て。三菱重工が組み立てと試験を行っております。この写真は、出荷の時の写真になります。右側です。制御装置と書いております。これは三菱プレシジョンさんに担当いただいております。いろんな機器、各メーカーさんに開発を担当していただいております。今日もいくつかご紹介させていただきます。この制御装置、CCUと呼んでおりますが与圧モジュールのいろんな制御を行っている装置になります。
藤原:続いて左下です。機械加工を光製作所さんに担当いただいております。与圧モジュールが金色に見えてますが、これは断熱材でして、内側に左下の写真のようなアルミ構造の主構造があります。この部分の機械加工の一部を光製作所に担当いただきました。右下です。消音装置とあります。消音装置、サイレンサーですとかファンの防音カバーといったものを担当いただきました。これによりまして与圧モジュールの中は機器が作動していても図書館ぐらいの非常に静かな空間が実現できると思います。左上、カーゴ搭載ラックになります。これはIHIエアロスペースさんになります。このラックは先代の「こうのとり」から改良を重ねて使っております。今回が第6世代になります。今ここの写真に写っております8台がありますが、これがHTV-Xの1号機に搭載する8台になります。
藤原:続いて右側です。空調ダクトということで八十島プロシードさんです。これは3D造形を生かしまして、ダクトの内面側に複雑な吸音構造を作るということで、これも与圧モジュールの静音化に起与しているというものになります。続いて左下が通信変換処理装置でAESさんに担当いただいております。カーゴや実証ミッション機器とHTV-Xの間の通信を行う機器となりまして、データの録画ですとか再生処理、転送といったところを行う機械になります。最後、右下です。これはハードウェアではございませんが、運用準備というところで、軌道上の運用で使用する手順書ですとか、NASAとの協調運用に関わる管制チームとの調整支援などというところを宇宙技術開発さんに担当いただきました。
鵜川:サービスモジュールの方は三菱電気から説明させていただきます。まず特徴的なところを4点記載しています。1つ目は効率的なモジュール構成ということで、JAXAさんの資料にもございましたけども、HTV-Xの飛行機能になります電気系の部分、それから推進系の部分、いわゆる人工衛星のバス機能を1つのモジュールに集約しております。さらに曝露カーゴ搭載部も合わせて、1つのサービスモジュールという大きなモジュールを構成しています。与圧モジュールとのインターフェースは簡素にしまして、射場での組み立て等も効率的にできるような構成になっております。

鵜川:2つ目は展開型の太陽電池パドルの搭載ということで、これまで「こうのとり」ではボディマウントの太陽電池パドルでしたけども、今回、展開型にすることで発生電力を1.5倍にするということで、カーゴや実証ミッション機器へ電力供給が可能になったり、バッテリーの数を減らしたりというような効果を得ていきます。
鵜川:3つ目は曝露カーゴ、実験装置の搭載ということで、右の図の上段の曝露カーゴ搭載部というところに直接カーゴを搭載する方式にすることで、大型のカーゴ実証ミッションを搭載可能としています。
鵜川:4つ目は推進系の構成で、こちらも先ほど説明にありました通り、「こうのとり」で使っていたメインエンジンは無くしまして、24本のエンジンのみで姿勢制御、軌道制御、両方可能な構成としております。
鵜川:こちらサービスモジュールの開発試験の紹介をさせていただきます。1つ目がサービスモジュールの構体の静荷重試験というものでして、これはロケット打上げ時の負荷状態を模擬した試験を実施しまして、HTV-Xの構造設計の妥当性を確認しております。2つ目、右側が太陽電池パドルの展開試験です。今回新しく搭載されます展開型のパドルが軌道上で確実に展開できるということを、実際に地上でも展開動作をさせることで確認・検証しております。左下がサービスモジュールシステム試験です。サービスモジュールとしては電気系の搭載部と推進系、曝露カーゴ搭載部と、3つのモジュールをそれぞれインテグレーションして製造進めていますが、その3つを結合した状態で、サービスモジュール全体として組み上げた状況での打上げ環境であるとか、軌道上での各種環境に耐えられるというところを検証しております。
鵜川:で、その中の1つとしまして、右下にある熱空試験というのを実施しております。こちらは鎌倉製作所の方にあります大型スペースチャンバーというのを用いまして、軌道上での真空環境、高温・低温環境を模擬した試験を約1ヶ月かけて実施しております。
鵜川:続きまして次のページからハードウェアの紹介になります。まず左上、サービスモジュール全体としては三菱電気の鎌倉製作所の方で組立・試験を一通り実施しております。右側、サービスモジュールの中でも非常に大きな構成要素になっております推進系、構造系、曝露カーゴ搭載部についてはIHIエアロスペースさんの方で設計からインテグレーションまで実施しています。左下、ソフトウェア管制システムということで、サービスモジュール全体を制御するソフトウェアでありますとか、運用を支える運用管制システム・OCSは三菱電気と三菱電気ソフトウェアの方で協力して開発を行ってきております。
鵜川:右下、バッテリーですけども、HTV-XのバッテリーはGSユアサの方でセルを開発しておりまして、それを三菱電気の方でバッテリーモジュールとして組み上げるという形で開発しております。このHTV-Xで開発したバッテリーについては、HTV-Xだけでなく次の月周回ゲートウェイでも採用されることが決まっております。
鵜川:左上、構体系です。HTV-Xのサービスモジュールは八角形の構造になっておりまして、構造全体はIHIエアロスペースさんの方で取りまとめしていただいいておりますけども、その元で日本飛行機さん、大起産業さんの方で実際の構体の製造を狙っていただいております。で、右側になりますが制御装置・電源機器ということで、写真はHCEというヒーターの駆動制御回路になりますが、それ以外にも推進系バルブの駆動制御回路であるとか、電源系の機器であるとか、サービスモジュールのバス機能を支える多くの機器を、この三菱電気ディフェンス&スペーステクノロジーの方で設計製造しております。
鵜川:で、左下、相対航法センサーですが、こちらは宇宙ステーションとHTV-Xの間の相対的な距離や姿勢を計測するセンサーになります。こちら、これまで「こうのとり」では海外製センサーを搭載しておりまして、HTV-Xでも海外製センサーも使用しますけども、それと併用して日本電気の方で開発していただいている国産のセンサーを採用しております。
鵜川:最後、右下、モニターカメラは、太陽電池パネルの展開状態であるとか、曝露カーゴの状況を軌道上でモニターするためのカメラを明星電気さんの方で開発いただいたものを搭載しております。
藤原:射場作業、こちら三菱重工が実務面を管理させていただいておりますので私からがご説明いたします。自系列で書いております。左側から始まります。今年3月にサービスモジュールとPMA(与圧モジュールアダプタ)が種子島に搬入され、その結合から作業が始まっております。その後サービスモジュールの搬入後点検ということで、電源投入した機能確認を行っております。次に与圧モジュールの作業が始まりました。与圧モジュール自体は2022年に種子島に搬入しておりました。長期保管を経てここで射場作業を始めております。ここで初めてサービスモジュールと与圧モジュールが同じ建屋に揃ったという状況になってます。
藤原:その後、次は実証ミッションで、DELIGHT、iSEEPといったものをUPCSS(曝露カーゴ搭載部)に搭載しております。その後、UPCSSと、セントラルシリンダーというサービスモジュール側の構造の一部を先に結合しております。写真で円筒状に写っているものになります。その後にサービスモジュールとUPCSSの結合ということで、これでサービスモジュール側がこ完成したことになります。その後、次は与圧モジュールとサービスモジュールの結合ということで、サービスモジュールを吊り上げまして与圧モジュールの上に設置するということで、ここで初めてHTV-Xが見た目として全機結合した姿が見れたという状況になっております。
藤原:その後H3側とのフィットチェックも行っております。H3ロケットの衛星搭載部(PAF)の上にHTV-Xを置きまして、機械的・電気的結合を確認をしております。最後、今は全機機能試験というのを実施しております。与圧モジュールとサービスモジュールを結合した状態での機能確認というのを行っております。6月の第一週まで予定しております。今日ご覧いただくのはこの形態になります。
伊藤:それでは今後の予定についてご説明いたします。筑波では実運用に向けた1号機固有の運用訓練を継続して実施して参ります。先ほど訓練は約8割ほど終了したと申しますけども、残りの2割について継続して実施いたします。右側の写真は運用室で訓練をしてる様子です。種子島ではシステム試験がほぼほぼ終了いたしまして、その後、全機結合を解除いたしまして、サービスモジュールと与圧モジュール個別の作業を並行して行います。サービスモジュールは推薬を充填する。与圧モジュールについては与圧カーゴを搭載いたします。引き続いて再び全機結合いたしまして、フェアリングに収め、ロケットに搭載をいたしまして、最終的には打ち上げの前に与圧カーゴのレートアクセス作業を行いまして、カーゴを搭載するということになります。
資料には付録がありますので簡単に紹介させていただきますと、現在の様子はこのような状況になっております。左側は本日午後見ていただけるんですけども、右側の上の方は曝露カーゴ搭載部を上から撮った写真ですが、すでにDELIGHTとiSEEPが搭載されております。それから右下の写真ですけども、与圧モジュールの下部、下から潜り込まないと本日ご覧になれないかもしれないんですけども、ハッチがあって、こちらが宇宙ステーションとの結合部分、宇宙飛行士が通るところとなっております。それから最後のページは主要概要・特徴を1枚でまとめたものですので、ご覧いただければと思います。
第一部 - 質疑応答
KTS鹿児島テレビ・轟木:1号機の総開発費としては大体360億ぐらいで間違いなかったか?
伊藤:そうですね、約360億という数字で公表させていただいております。
轟木:もう1点、今回HTV-Xを開発していく上で苦労された点、今後の打上げに向けて期待・想い
伊藤:まず苦労した点なんですけども、私がHTV-X開発を始めて約9年になりますけども、それまでにHTVの打上げ・運用が成功していたこともあって、その結果を十分に反映出来た、引き継げたこともあり、全体的には非常にうまく開発ができたと思ってます。ただし形態が変わることによって新しい開発要素が出てきますので、そこにつきましては色々不具合が残っておりました。ものすごく大きなものはないんですけども、細かいものが常にありました。ただ、私の昔の先輩から教えていただいた言葉なんですけども、地上で起こった不具合がたくさんあればあるほど、それを解決すればするほど、軌道上ではうまくいく、と言われたことがありましたので、それを励みに、不具合が出て解決することで確実に開発・運用ができるんだなという風なことで解決を進めてまいりました。具体的に何が苦労したかというのは、大きなものはないんですけども、細かいものはたくさんあったっていうことでお伝えしておきます。
伊藤:これからの意気込みなんですけども、HTV-Xは今1号機の準備ができて、ほぼ完成して打上げを待つところです。確実に成功させると自信を持って言えると思うんですけども、HTV-Xは1号機に限らず2号機、3号機、政府の宇宙基本計画工程表では5号機まで計画されておりますので、確実に5号機まで成功させて、HTV-Xとしての新しいレガシーをHTVに引き続き確立していこう、という意気込みが非常に強いです。
NHK鹿児島局・財前:開発期間は、2017年10月から今もなお開発中なのか。
伊藤:まず38ページでも説明したいと思うんですけども、開発自体は、2015年にJAXAの中でこのHTV-Xの概念検討を始めてから現在まで10年。私が引き継いだのは16年ですので9年になりますけども、概念検討が終わってプロジェクトチームとして立ち上がったのが2017年10月です。HTV-Xプロジェクトチームとして正式にJAXAの中で立ち上げたのが2017年10月。それから約7年半が経ってるところです。現在は先ほど藤原さんから説明がありました通り、38ページに示すところでは、システム試験、これはHTV-Xの1号機が最初の開発ということで1号機限定ですけども、システム試験がほぼ終わるところです。新規開発としてはここで一旦大きな区切りがつけられると思いまして、その後は打上げに向けて、燃料を充填する、それから与圧カーゴを搭載する。それから電気結合を行ってロケットに搭載して打上げを待つというところですね。そういう意味で1号機としての開発はほぼすで終了、あと1週間ぐらいで終わる。あとは打上げに向けた準備を始めるというところです。
財前:ということは、構想段階からカウントすると2015年から10年近くかけて開発された、と認識で正しいか?
伊藤:そうですね。はい。
財前:レイトアクセスは1日前までに搭載することができる、これまでの「こうのとり」では3日前までだったが、これはどのようなニーズがあったのか?24時間前まで搭載できる期間が伸びるメリットとは?
伊藤:ISS・国際宇宙ステーションで各種実験をやる中で、実験の準備を地上で行って早くISSに届けたい、という実験サンプルが幾つかあり、それがHTV-Xを開発する段階で顕在化されてきた。そのニーズに合わせてレートアクセスを24時間前にする。ものによっては冷蔵庫あるいは電源を必要とするサンプルもあるということで、HTV-Xでは新たにその機能を付加したというところです。
財前:給電カーゴも搭載できるっていうのは、マイナス何十度で保存しないといけないとか、細胞だったりとか
伊藤:そうですね、そういう類の実験サンプルと理解していただければいいかと思います。
東京とびもの学会・渡辺:H-SSODの搭載場所は与圧部カーゴで良かったか
伊藤:与圧部カーゴではありません。ページで言うと40ページを開いていただきますか?40ページの左の写真の下から2つ目、1番下がスラスタで、その上にH-SSOD(えいち・そっど)、これはJEMに搭載しているJ-SSODの技術を活用して、HTV-Xに搭載しますのでH-SSODと呼んでるものですけども、こちら現在は搭載されておりませんけども、こちらはサービスモジュールの脇、人間で言うと脇腹あたりに搭載する予定としております。本日はご覧いただけないことになります。
渡辺:与圧カーゴは1日前まで大丈夫だが、曝露カーゴは大体どれぐらい前までに
伊藤:各ユーザさんには1.5ヶ月前2.5か月前までに持ってきてください、というようなお願いをしてあります。HTV-Xの1号機のDELIGHTおよびiSEEPにつきましては、既で種子島に搬入してただいておりまして、この一連の作業の中で曝露カーゴ搭載部に搭載できるということで、あらかじめ前もって搭載しておるところです。
渡辺:2号機以降は大体1.5ヶ月前までに?
伊藤:そうですね。1.5ヶ月2.5か月ぐらいまでに持ってきていただければ搭載できます、というような形でユーザーさんにお願いをしているところですね。
渡辺:その選定の方はどれぐらい前に?
伊藤:NASAとの間では24ヶ月ぐらい前にカーゴを決めていただいて、技術的なインターフェースは18ヶ月ぐらい前までに決めましょう、ということでお願いしているところですが、カーゴによって技術的難度が違っていたりとかありますので、そこら辺は柔軟な形でカーゴによって搭載する・しない、どういう形で搭載するか決めさせていただいてるところです。一声2年ぐらい前には候補が決まる。ただ柔軟的に、もう少し早い場合もあるし、もっと短い場合もあるというところは柔軟に対応してるところです。
渡辺:もう大体2号機も決まってる?
伊藤:そうですね。2号機についてもほぼ決まっていて、まだ最終決定ではありませんけども決まりつつある、という風にご理解いただければと思います。
共同通信・鶴原:打上げはH3ロケットの24形態?
伊藤:24形態になります。
鶴原:「こうのとり」のように愛称を募集するか?
伊藤:今は愛称を募集するということは考えてはおりません。
鶴原:なんかこう理由があるとか
伊藤:そういう気運が盛り上がったら、あるかもしれません。
鶴原:アメリカの政権がゲートウェイ建設をやめるという意向を示しているが、HTV-X2号機でゲートウェイ到着時に必要な自動ドッキングの技術実証について
伊藤:まず、アメリカのトランプ政権からNASAの予算について、案として出されていることは承知しておりますけども、最終的にはまだ決定してないというのが私たちの理解であります。それから自動ドッキングにつきましては、ゲートウェイもそうなんですけども、これは将来的な宇宙輸送機については自動でドッキングできる技術は必須になります。先ほども説明の中でご説明いたしましたけども、今はHTV、HTV-Xともに最終的にはロボットアームで宇宙飛行士がつかまえるという、最終的には人の手を介すのですけども、将来、ゲートウェイもそうですし、将来的なステーション、有人活動につきましては、自動でドッキングできる技術が必須だと我々考えておりますので、これについては開発を進めるということを考えております
鶴原:輸送機として使うとして他国と比べての強み
伊藤:HTV-Xの強みということ2つの特徴を説明いたしましたけども、1つは6tのカーゴが搭載出来ます。今のところアメリカの輸送機に比べても1番多い搭載量だと思いますし、その中でも大きな曝露搭載部の空間を生かして大きな装置・カーゴが搭載できるのが大きな特徴だと思っております。それからISSを離れた後でも違う目的で利用できるというのも1つ大きな特徴だと思ってますので、HTV-Xは他国の輸送機に比べて大きな特徴があるかなという風に思っています。
秋山:ISSから100kmほど上・500km付近の高度で実証を行うと決めた背景。すぐ上に非常に大きな衛星コンストレーションがあって混み合っているが、訓練が難しくなる、何か複雑になるのか
伊藤:高度につきましてはISSから約100km上げて500kmぐらいとしておりますが、それはHTV-Xの推薬、高度を上げるためにはやっはり推薬が必要ですので、推薬の制約上それほど高度は上げられませんので、500km程度というところで現在設定しておりまして、無選局の申請もそこでしておるというところです。今のところ申請も含めて500kmが上限。
伊藤:それから、この辺の辺りで他の衛星との競合等で運用がものすごく難しくなるというのは現在私の方では特に存じておりませんので、普通に運用できるという風に考えております。
秋山:技術実証ミッションがあるということは廃棄物を抱えた状態で最大1.5年軌道上にいるのか?その場合に安全審査等に加わる要素はあるのか?与圧部の静音性が嬉しいとは宇宙ステーションの宇宙飛行士委にとってなのか?
藤原:廃棄能力の点ですが、実証ミッションの運用計画上は、排棄物をHTV-Xの与圧モジュールの中に満載した状態で運用ができる、という前提で計画をされておりますので、排棄物があるかないかが実証ミッション能力に影響することはない、それが前提で運用が計画されているというものであります。また安全についてもHTV-XにHBXに搭載する時点で必要な安全評価をされておりますので、その後の実証ミッションが長い短いは評価には影響ないというふうに理解しております。
藤原:それから2つ目、静音性という点で、おっしゃられた通り宇宙飛行士にとってうるさい環境は良くないということで、可能な限り静かなのが好まれています。先代の「こうのとり」や「きぼう」も含めて日本のモジュールはかなり静かにできているということで、宇宙飛行士からは好評だと聞いております。
南日本新聞・上岡:与圧カーゴと曝露カーゴ、合わせて6tの搭載能力があるが、1号機では技術実証ミッションまで含めてどのくらいの重さになるか?
伊藤:与圧カーゴについてはこれから搭載が決まりますので最大4tくらいは搭載できるのかな、と思っているところ。それから技術実証ミッションの曝露カーゴにつきましては合計500kgぐらい。
読売新聞・山路:輸送能力が4tから6tに上がったが体積的にどれぐらい大きく積めるのか、どんなものが搭載可能になったのか?
伊藤:12ページ真ん中の左、1番左に輸送能力の増強で容積がありまして、これは約60%程度大きくなっております。これによって大型のカーゴなり実験装置の搭載が可能になりましたので、1つ先ほどもご質問がありましたが、大型の実験装置になります自動ドッキング実証が軌道上で出来る。これは物資を輸送した後で大型の実験ができるという1つの代表例だと思っております。同様に他の大きな装置、カーゴが今後出てくるのではないか、HTV-Xを活用できる機会が増えるのではないかという風に思っております。
山路:政府の計画ではHTV-Xが2029年度までに5回で運ぶ計画で、ISSの運用が30年に終了する見込みだが、この5回は全てISSに運ぶ想定か
伊藤:ISSの運用延長期間も想定して5回運ぶということをJAXA側で想定をしておりまして、NASAもその理解でいるということです。
山路:30年度以降は?
伊藤:30年度以降はどうなるか、今後動向を注目というとこでしょうか。
NVS・崎田:2023年の8月の20日にペイロードアダプタがエアバスディフェンス&スペース社から、今年の2月18日にフェアリングがビヨンドグラビティ社からそれぞれ種子島に搬入されているが、海外製を使用することになった経緯
伊藤:23年8月20日はPAF、今年の2月18日はフェリングのことですね。まずHTV-Xは大型の衛星、輸送機ですので、H3ロケットが準備している標準的なPAFと呼ばれている、ロケットとのインターフェイス結合部は使えないです。標準的なものは1.6mですとか1.2m、0.9mなど3種類ありますが、HTV-Xでは使えず特別なものを作っております。それが約4.2mぐらいのPAFなんですけど、それはHTV-X特注なものであるために海外製のPAFを作っている、それが1点。フェアリングにつきましても、H3が標準的に用意しているものではなく、少し長くて幅が広いものでありますので、これも海外で実績のあるものを採用したというところでございます。
崎田:Lタイプとワイドタイプで直径では20cmぐらいしか差が無いと思うが、Lタイプを改良して使うということはできなかったのか?
伊藤:ちょっと幅が広くなったということで、HTV-Xは特有のフェアリングを採用したというところでございます。
崎田:フェアリングとH3 2段上部との結合は今までと変更点があるのか
藤原:ロケット側の作業になりますので、私が聞いてる範囲でご説明いたします。作業として大きな流れは、H-IIB・「こうのとり」の時と今回のH3ロケット・HTV-Xで流れとしては同じと聞いております。作業そのもののデモンストレーションもH3ロケット側で実施しておりますので、何か大きな課題が出てるといったことはなく、順調に行くものだと思っております。
NVS斎藤:「こうのとり」は数日かけてISSに行くという形になるが、HTV-Xに関しても数日かけていく形になるのか?アーリーアクセスみたいな18時間とか6時間等のプランはあるのか?
伊藤:HTV-Xは「こうのとり」に比べて、推薬を噴射して軌道を変える等のマヌーバの数を、HTVの運用結果を踏まえて回数を少なくすることによって、HTVに比べてISSに到達する時間は短縮することが可能です。大体3日以内につく。これは打上げの時のISSとの間の相対的な位置関係で決まることなんですけども、最長でも3日です。そういう意味ではHTVよりも短縮して到達することが可能。ただ1号機につきましては、1号機ですので、到達する前に運用の実証みたいなものを考えておりまして、少し時間をかけて、1日ぐらい余計に運用の実証を行いがながら到達しますので、3日から4日という風に説明をさせていただきました。
伊藤:それからアーリーアクセスなんですけども、それはありません。ISSの場合はクルーを輸送する、そのためにISS側でも軌道の調整をするとか、そういうような用途で使われると思いますけど、HTV-Xの場合は打上げ日のISSとの相対的な位置関係によって3日乃至は2日ぐらいの短縮期間でISSに到達するという計画を立てております。
斎藤:「こうのとり」は曝露パレットの上に搭載物が乗っていたが、HTV-Xの場合は?
伊藤:曝露パレットで共通的な土台を作ってその上にカーゴを搭載する、というのがHTVではありましたけども、その暴露パレットに代わって、HTV-Xではこの曝露カーゴ搭載部に搭載することになります。HTVX-でカーゴ搭載能力が増強された1つの要因として、この曝露パレットではなく曝露カーゴ搭載部にダイレクトに搭載できるていうのが1つ、輸送能力が増えた一因でもあります。
斎藤:ファンとしては愛称があった方が嬉しいなと思いますので、ご検討ただけると幸いです
伊藤:お聞きいたしました。
第二部
登壇者(以下敬称略)
- JAXA有人宇宙技術部門新型宇宙ステーション補給機プロジェクトチーム ファンクションマネージャ
若月 孝夫(わかつき たかお) - JAXA研究開発部門第二研究ユニット 研究領域主幹
上土井 大助(じょうどい だいすけ) - JAXA研究開発部門第一研究ユニット 主任研究開発員
奥村 哲平(おくむら てっぺい)
配布資料:新型宇宙ステーション補給機(HTV-X)1号機の技術実証ミッション概要

若月:新型宇宙ステーション補給機・HTV-Xですが、全体の説明の中で、2つの仕事、2つのミッション目的があるという風に述べました。1つ目は宇宙ステーション補給機という名称にある通り、宇宙ステーションへ物資を運ぶという役割です。こちらは先代の補給船「こうのとり」から役割を引き継いだもので、我が国がISS計画に参画して運用利用を行うにあたり必要な役割を、この「こうのとり」それからHTV-Xによる物資補給により果たしていこう、という1つ目のミッション目的になります。
若月:先ほどの説明にもありましたが、HTV-Xは「こうのとり」よりも物資の輸送能力が増強しており、また運ぶ荷物に対するサービスも向上している。これにより力強い輸送を行っていきます、というのが1つ目です。2つ目が、将来の宇宙技術へ繋がるコアな技術を獲得しよう、それが2つ目の目的になっており、さらにその中で、1つは、HTV-Xといういい機体を作りましたので、このHTV-Xを活用して、将来の地球低軌道でのミッション、それから国際宇宙探査の様々なミッションで活躍していけるようなベースラインの機体を作ろうというのが1つです。もう1つが、物資補給を行うのが主目的ですが、それではもったいないぐらいのいい宇宙船ができておりますので、宇宙ステーションミッションが終わった後、さらに技術実証の場を提供する。それが、もう1つの役割になります。今日の資料では1号機で行う技術実証ミッションの概要についてご説明いたします。
若月:宇宙ステーションに接近して結合している期間を宇宙ステーションの係留期間と呼んでいますが、最長6ヶ月の係留が可能となっておりまして、その期間で物資の輸送、送り届ける物資の搬出、それから宇宙ステーションで不要になった廃棄物資の積み込みというのを行う期間、これが係留しているという期間になります。その後宇宙ステーションを離れた後、先代の「こうのとり」では基本的にはすぐに再突入というのを行いミッションを終えるといった流れでしたが、このHTV-Xは、まだまだ活用可能性のある機体ですので、技術実証ミッションフェーズという期間において、様々な技術実証の場を提供しましょうと。それが大きな特徴になっております。
若月:1号機で行う技術実証ミッションの概要について示します。3つの技術実証ミッションを実施する計画でして、1つ目が超小型衛星の放出、H-SSOD(エッチソッド)と呼んでおります。ミッション取りまとめ等はJAXAの有人宇宙技術部門、我々のプロジェクトで実施しております。2つ目が軌道上姿勢運動推定実験、Mt.Fujiと呼んでおります。こちらはJAXAの追跡ネットワーク技術センターで実施しております。3つ目が展開型軽量平面アンテナ軌道上実証・DELIGHT、それから次世代宇宙用太陽電池軌道上実証SDXと、JAXAの研究開発部門で担当しております。後ほど詳細の説明があります。
若月:これら1つ1つについてこの後紹介しますが、1号機の全体を総括しますと、新しい取り組みとして技術実証の場を提供するということで、プラットフォームの使い勝手の確認という意味で、ユーザーの方々との連携の仕方、それからインターフェース、技術的なインターフェースもそうですし、仕事の進め方という意味での作業プロセスの構築といったことを1号機では取り組んできています。
若月:選んでいる3つの実証ミッションについては、HTV-Xの特徴として、自在な飛行能力というお話をしておりましたが、姿勢が自在に変更できる、それから高度が柔軟に変更できる。それから今回DELIGHTという大型な展開構造物ありますが、こうした大型の展開構造物を展開することが可能な土台、大きな衛星システムがあるといった特徴がありますので、その自在な飛行能力を確認するミッションというのを3つ用意しているといったところです。
若月:あとは、機体のいちばん上部にあります暴露カーゴ搭載部というところに技術実証ミッション機器を乗っけるというのを、標準の搭載場所にしておりますが、1号機は更に色々試してみようということで、1番左のH-SSODというのは、サービスモジュールの下端の部分、与圧モジュールとの結合部で斜めになってる斜面があるんですけど、そこを利用した衛星放出を行います。それから真ん中のMt.Fujiについては、与圧モジュール側に後ほどご説明するMt.Fujiという機器をつけている、そういったことで様々な場所に搭載して、どれだけの能力を提供できるのかトライしようと思っております。
若月:で、3つの実証ミッションで、およそ全体で3ヶ月間ぐらいの期間と考えています。この図では、縦軸に地表面地からの高度、横軸にタイムライン、時間の経過を並べておりますが、1番左は暴露カーゴ、iSEEP移設と書いてありますが、これはステーションのミッションです。係留期間中に、与圧カーゴももちろん全部下ろしますが、暴露カーゴであるi-SEEPを下ろしてISS側に移設します。すなわちステーションから離脱する時には暴露カーゴ搭載部にi-SEEPはありませんので、DELIGHT/SDXだけが大きく載っているという状態で離脱していきます。
若月:ミッションは1つ目がH-SSODを行います。こちらは高度を上げまして、約500kmからの衛星放出を実施します。引き続き高い高度を維持したままMt.Fujiというミッションを約3週間ほど実施します。さらに、高度を下げてきてDELIGHT/SDXを約2ヶ月ほど実施する。こんな3ヶ月間の計画になっております。この次のページから3つのミッションの特徴についてご説明していきます。5ページをお願いします。
若月:こちらがH-SSODと呼んでおります超小型衛星の放出になります。副題として、ユーザー要望に合わせたオンリーワンの衛星放出、という風に書いておりますが、私たちJAXA有人部門は国際宇宙ステーションにきぼう日本実験棟があります。そこからの衛星放出はこれまで多数行ってきておりまして、JEM、日本の実験棟からの放出なのでJ-SSODと呼んでおりまして、その親戚のような形でH-SSODと名付けたんですが、HTV-Xで行う場合は、お客さんの要望に柔軟に対応はすることができます。具体的には高度500kmまで能力的に上げられるので、500kmで衛星放出をすることで、超小型衛星にしておいては軌道上寿命が延びます。それによる運用期間の延長であるとか、より高度なミッション、短期間で落ちてしまうのではもったいないですけれども、長期間居るんであれば高度なミッション狙ってみようと、そういったユーザーにも対応できるという風に考えています。あとは自在な飛行能力、ミッション意義のところに書いておりますが、例えば高度差をつけて、あるいは位相をつけて、位相というのは地球に対して角度がずれたようなコンステレーションを組むとか、そういった要望があればそれに対応した放出もできるというような仕組みにしております。
若月:1号機では1機のみですが、「てんこう2」という日本大学の衛星を搭載します。右下に写真がありましたが、サービスモジュール下端の斜面のところにつけてます。イメージは右の下の実際の試験時の様子で、太陽電池パネルが畳まれていますが実際には軌道上で展開しておりますが、その下の斜面のところに、こうした衛星放出機構をつけまして、つくばからコマンドを打ち、サービスモジュールを経由して、この衛星放出システムを作動させて衛星を放出する、といったミッションになります。
若月:2つ目のミッションがMt.Fujiになります。7ページ右上にSLRと書かれています。これは衛星レーザー測距になりますが、地上からレーザーパルスを打ちまして、衛星で反射してきて戻ってくる、入射した方向に同じ方向に光を反射させるようなリフレクターを載せてますので、それに対して往復時間を精密に計測することで、衛星の軌道推定を行ってます。これは従来から使っている技術になります。今回HTV-Xでは、左のイメージ図にある通り、与圧モジュール、下の円筒系のところですね、そこのロケットとのインターフェース面に近い下端の部分の、ハッチであるとかステーションの結合部に近いところに、こういった小さなMt.Fujiと呼ばれるリフレクターの集合体を付けています。合計3つ付けてます。今1つが光っているように見えますが、120°ずつで3つを付けております。
若月:このMt.Fujiを載せたことで、ミッション概要の3行目にありますが、cm単位でのHTV-Xの精密軌道決定っていうのができます。これはレーザー測距の技術を使ったものです。これに加えて、最近ではSLRによる対象物体の回転運動であるとか、軌道上でどういった運動をしてるのか見るという研究が進んでおります。これを活用しまして、HTV-Xでは意図的に与圧モジュールを下端に向ける、普通衛星って同じ方向で飛んでますけど、HTV-Xは自在な飛行ができますので、Mt.Fuji運用の時は与圧側を下に向けて、立てるような運動、飛行姿勢を取ってみたり、あるいは振り子のように振ってみたり、回転してみたりということになります。それをこのSLRで観測することで、そのデータが地上に降りてきます。
若月:姿勢情報からHTV-Xがどのような運動してるのかっていうのを導く地上のチームがいます。これが左下で言う答案ですね。HTV-Xはこのように動いているだろうという答えをSLRの観測データから算出します。一方で、HTV-Xの姿勢のデータっていうのはテレメトリという形で降りてきますので、真値が分かっている、正解が分かっているので、この正解と答案を定量的に精度評価するということで、先ほどSLRによる対象物体の回転運動把握が最近研究されてるということでしたけど、初めて答え合わせができるということで、この真ん中に書いてある定量的な解析は世界初と、これを狙うMt.Fujiというミッションになります。これを搭載するにあたっては、HTV-Xの自在な姿勢飛行運動ができるといった特徴を大いに生かしたミッションということになります。
上土井:DELIGHT/SDXのミッションの概要になります。宇宙太陽光発電システムのような数百m〜数km級の大型宇宙構造物の構築を見据えたもので、DEployable LIGHtweight planar antenna Technology demonstrationの略称としてDELIGHTと呼んでいます。HTV-XがISSから離脱しH-SSODやMt.Fujiの実験が終わった後、DELIGHTの実験をします。実施するものが大きく4つありまして、まず1つ目が、これが一番メインなんですけども、展開型の軽量パネルを展開していく。2つ目が、その展開していく時の挙動、どういう風な開き方をするか、展開後の振動の状況を計測したりだとか、あと面精度等も計測します。3つ目は、そのパネルの一部に実装された軽量平面アンテナの機能実証ということで、地上の小さなホーンアンテナから電波を出して、それを軌道上の軽量平面アンテナで受信することで、アンテナとして正常に使えるかを見たい、というのが3つ目です。4つ目はSDXと呼んでるもので、最新の太陽電池セルの電流電圧特性の計測をしていく。

上土井:DELIGHTですが、大きく3つから構成されてます。1つ目が展開型軽量パネル(DLP)。2つ目が軽量平面アンテナ(LPA)。3つ目が次世代宇宙用太陽電池実証装置(SDX)。それら3つの配置ですが、HTV-XにDELIGHTが取り付いて、開いた後のパネル部分は4m×2.2mのサイズ感です。DELLIGHTのシステムの大部分はDLPになりますが、そのDLPの中でHTV-X側と直接インターフェースする制御装置部分をDLPバス部と呼び、展開するパネルのところをDLPミッション部と呼んでます。そのDLPミッション部は1m×1mのパネル8枚で構成されてるんですけど、その8枚のパネルの1つに三角形のLPAというアンテナが実装されています。で、図中DLPバス部のところにSDXという線がありますが、そこが最新の太陽電池のセルを搭載しているところになります。
上土井:ここからはミッションの目的についてご説明します。大きく2つあり、まず今回、パネルを展開・結合する新しい機構を考案しました。もう1つ、すごく薄い膜上のアンテナを考案しましたので、それらを実装した展開型軽量平面アンテナが軌道上で正常に動作することを実証するのが1つ目です。2つ目は、今回の実証機を開発するにあたり、パネルがどう展開していくか、あと構造や熱などの妥当性、設計をするための解析を行っています。今回は技術実証ミッションで、その先に目指したいものがありますので、そこに繋がるように、今回実施した解析の妥当性を確認していくというのが2つ目になります。
上土井:で、左下の図が展開型軽量パネル展開の一連の流れになってます。一番左上がパネルが収納された状態です。ここからスタートして、HTV-Xに今搭載されてる状態もこの収納状態で搭載されてます。一気に8枚展開するのではなく、まずその4枚分・1列を展開をし、その後2列目を展開するという方式を取っています。
上土井:軽量平面アンテナの実装については、右側に写真を載せていますけれども、非常に薄いアンテナになっていまして、平面型のアンテナを構成する時には普通ハニカムサンドイッチパネル等を構造体に持ってきて、そこにパッチアンテナという絆創膏のようなアンテナを貼りますが、今回はその構造体をCFRP製の膜上にすることで、厚さ1.3mmの非常に薄いアンテナ、膜状なアンテナを作りました。
上土井:ミッションの意義について。SSPS・宇宙太陽光発電システムが必要とする規模感は非常に大きなものですが、現在100m以上の構造物の実現に向けて、まず30m四方の大きな平面アンテナを作りたい、という目標を立てて研究中で、その主要技術、どうやって平らに構築するかというところの解決と、軽いアンテナの解決に貢献するのが1つ目です。もう1つ、今回新しい技術を獲得できると、今既に衛星に搭載されてる平面アンテナの大型化に貢献するので、宇宙太陽光以外の、地球観測、通信、電波天文、災害監視、安全保障と、様々な宇宙ミッションとして実現されてるもののパワーアップができる。衛星搭載用アンテナの性能を格段に向上させることができるだろう、というところを考えています。

奥村:次世代宇宙用太陽電池軌道上実証・SDXの説明をさせていただきたいと思います。SDXでは将来宇宙用太陽電池としての活用が期待される太陽電池の宇宙実証を行うことを目的としています。このSDXでは太陽電池の出力を定期的に計測し、軌道上で新型の太陽電池が正常に動作することの確認を目的としています。このミッションの目的ですが、まず1つ目としてJAXAと民間企業が開発した、オリジナル構造で超高効率を実現するフェニックス太陽電池、こちらの実証となります。このフェニックス太陽電池は今一般的に宇宙用で使われている3接合太陽電池を置き換えるもので、同じ3接合太陽電池ですが、インジウム・ガリウム・リンのトップセルとガリウム・ヒ素セルのミドルセルの薄膜2接合太陽電池の下に、CIGSという別な太陽電池、この2つの異なる太陽電池を透明な接着剤で接合することにより実現する3接合太陽電池となります。
奥村:この2つの太陽電池それぞれ特色があり、薄膜2接合太陽電池は薄膜3接合太陽電池に対して低価格で高効率、すなわち、なるべく高い初期効率と、特に重要な、ミッションのエンドオブライフでも十分な電力を供給できるだけの耐環境性を有していると。その下のCIGS太陽電池は特にコスト面でメリットがあると考えておりまして、この日本初の技術であるフェニックス構造の太陽電池の実証を目的としていると。2つ目が、こちらも日本初の技術なんですけれども、ペロブスカイト太陽電池の動作実証となります。それぞれ実証する太陽電池、この右側の写真に暴露部の様子を掲載しているんですけれども、フェニックス太陽電池の方が4枚、その左下にペロブスカイト太陽電池が合計7枚、実証対象として搭載されることになります。
奥村:このミッションの意義。現状、海外メーカーがコスト面で優位にあるんですが、これらを開発することによって低コストかつ高性能な、高性能というのは先ほども申し上げました通り効率がいいということ、あと宇宙用として大事な耐放射線性、衛星の寿命末期でも十分な電力を供給できるだけの性能を持った太陽電池であることが重要ですので、この高性能なセルを開発することは、日本の産業基盤、国際協力、国際競争力強化の要になると考えております。
上土井:(資料11ページ)DELIGHT/SDXがHTV-Xに搭載される時の状態の写真です。DELIGHTを搭載してる時の様子が左側の写真で、クレーンで吊ってHTV-Xの暴露カーゴ搭載部に載せている写真になります。では次のページお願いします。ここからはDELIGHTの実証の背景ですね。今私が所属している部署は、宇宙太陽光発電システム・SSPSを研究している部署になりまして、SSPSというのは、宇宙空間で太陽電池で発電して、そのエネルギーをマイクロ波やレーザーに変換して送って、その送ったエネルギーをまた電力として使うというシステムになります。で、左側の左上の図ですが、今までいろんなSSPSが検討されていて、例えば地上で1GW・原発1基分ぐらいのエネルギーを取り出そうとすると、どういうシステムになるか検討がなされた時に、宇宙側の構造物としては2km四方ぐらいの構造体が必要だというのがあります。サッカー場の大きさと比べると、長さ方向で約20倍ぐらいの非常に大きなものが必要になります。
上土井:一方で、今人類が作れている最大の宇宙構造物はISSで、これの幅が100m、サッカー場と同じくらいの長さになりまして、ISSは打上げたパーツを宇宙飛行士がロボットアームを操作したり船外活動して構築されましたが、同じようなやり方でSSPSをkmサイズで作ろうとすると、非常に時間もかかりますし、お金もかかりますし、安全性の問題もあるので完全に無人で作りたい、ということで研究をしてます。今の技術から考えると非常にハードルが高く、一足飛びには実現は難しいので、段階的に規模を大きくしながら軌道上実験を積み重ねる必要があると考えています。一方で、途中段階の実験であっても世の中の役に立つような社会還元、成果を社会還元することが大事だと考え、ステップを踏みながら、かつ成果を社会還元するということを考慮して、今ターゲットにしてるのが面積30m×30m以上で、面密度、重さのところは平米あたり3kg以下の大きな平面アンテナを実現にむけた研究をしていて、そこで使う技術の実証がDELIGHTということになります。
上土井:資料13ページの「DELIGHTのここがすごい!」というところで書いてますけども、今目標としてる大きな平面アンテナを作るにあたって、どうやって作っていくか、どう軽くするかが非常に課題となっているので、それを解決するための技術として新しく考えたものをDELIGHTで実証すると。それがうまくいけば大きなアンテナの実現に向けて大きく前進することに繋がると考えています。で、先ほど言いましたけれども、そういう大きなアンテナが実現してくれば、地球観測を始めいろんな分野でアンテナの性能が格段に向上し、レベルアップしていくということに繋がっていくと思ってます。
上土井:最後に動画の説明。これ今1列目の展開になってます。ガラス定盤の上にパネルを垂直に立てた形で展開実験をしていて、重力の影響をキャンセル、補償するためにパネルの下にエアスライダーをつけて空気浮上させ、摩擦の影響をなくした形で展開実験をしてます。パネル間に板バネが入っていて、それで展開力を与えて展開。展開後は、パネル間に隙間があって、1列目のパネル内にずっと通っている紐を根元のモーターで巻き取ると、パネル間の隙間がなくなり、パネルが引き寄せられていく、という仕組みになっていて、パネルの隙間が完全になくなると、パネル間にあるラッチ機構という結合する機構で強固に結合して1列目の展開が完了する、というものにります。
上土井:で、2列目なんですけど、1列目のフレームの中にカートと呼ばれる機構が入っていて、2列目の先端とカートが結合して、そのカートとつながった紐を1列目先端にあるモーターで巻き取ることにより展開力を2列目に与え、2列目のパネルが展開していく、というものになっています。なので1列目で使う機構と2列目で使う機構は違うものになっていて、これらを実証したい、という計画です。
第二部 - 質疑応答
読売新聞・山路:HTV-Xは補給船としてだけでなく人工衛星のような機能を持っているという理解でよいか
若月:補給船と人工衛星の定義がなかなか難しいんですけど、まず「こうのとり」で行っていたようなISSミッション特有の宇宙船というのが1つの特徴です。一方、実証ミッションを行う時は宇宙ステーションのミッションとは関係ないので、使えるリソースや制約も異なります。具体的には、そのフェーズに至ると宇宙ステーション運用で使っていたような米国のデータ中継衛星等は使えません。通常の人工衛星と同じように、地上局と直接通信するといった機能を有しています。そういう意味では、その期間、まさにいわゆる人工衛星という動きをします。技術実証ミッションの期間中は地上の局と通信してますよ、というのがそこを指していまして、通常のISSとの共同ミッションの間は地上局は使わずに運用しておりますが、この実証ミッションの期間は地上局運用というような形になりますから、まさにおっしゃる通り人工衛星的な機能を有したという形です。
山路:それを実現するためにHTVからHTV-Xで加わった機能としては、推進薬があること、地上局と通信ができるようになったことが大きなポイントか
若月:その2つは大きなポイントだと思っています。推進薬量については「こうのとり」よりも増強しています。タンクも大型のものにして、物資補給では必要ないような大型の推進薬が積むことができるという点と、地上局からの通信機能を持ったということもありますし、あとは実証ミッションではただ乗っけているだけではなく電力・通信も必要としますので、そういったユーザー機器に対する電力・通信の提供といった機能も持ってます。冒頭の説明で与圧の荷物に対しても、例えば冷凍冷蔵庫といった電力供給可能と言っていましたけども、暴露の搭載機器に対しても大きな電力と供給できるように、システムの高度化が図られています。
山路:ミッションで使うための装置に電力を供給するようなシステムも加わったということか
若月:はい
山路:ペロブスカイト太陽電池を宇宙で使う場合、地球上とどんな条件が違うか?それを宇宙で実証する必要があるのか?
奥村:ペロブスカイトは最近地上用で報道なども多いんですけれども、それを宇宙で使えるようにするやり方については、実は各社さんノウハウがございまして、それを実証することが今回のミッションとなっております。
山路:具体的にどう変更を加えるかっていうのは?
奥村:申し訳ないんですけど、それはメーカーさんのノウハウになりますのでお答えしかねます。
南日本新聞社・上岡:新たな太陽電池パドルが技術実証ミッションを可能にしたということか
若月:実証ミッションを行うために、あるいはカーゴに対するサービスを向上させるために、という観点で電力・通信機能を向上しています。それが太陽電池があったからなせる技というよりは、システム全体として成り立ってるっていうところが大きいと思います。あとは太陽電池を展開型にしたことで、長期間のミッション期間、地球と太陽との角度の差が変わっていくので、1年を通じて、いろんな期間に打上げを行ってもミッションができる、電力を稼げるように、太陽電池にちょっと角度をつけた展開にしています。それは1つの一因、一要因かなという風に思ってます。
若月:あと、搭載量をより多くしたいっていうことで、例えば重量が重たいので「こうのとり」であった一次電池をなくしています。太陽電池と二次電池のバッテリーだけで運用するというような、より衛星に近いバスシステムになっていたりとか、そういったことが総合的に組み上げられたシステムとして、このミッションが可能になっていると思っています。
上岡:技術実証ミッションは3ヶ月、高度500kmから300kmの間を周回して行うということでよいか
若月:超小型衛星の放出は、軌道上寿命の点で高い高度が求められますので500kmほどにします。次のMt.Fujiは地上からレーザーを打ちますので、視野がより確保できるという意味では低いよりは高い方がよくなります。その後のDELIGHTは地上との最後の電波の授受を行うには低い方がいいので、宇宙ステーションを挟んで最初の2つはより高い側で実施します。もう1つのDELIGHTは宇宙ステーションのちょっと下ぐらいかなといった運用高度で行うと思ってます。表現っていう意味では、500kmから300kmの間で実証実験を行うでよろしいかなと思います。
フリーランス・秋山:H-SSODは機能として複数衛星の放出が可能とのことだが、それは6Uの範囲内で例えば3U2つといったなのか、それともH-SSODを複数取り付けるみたいなことも可能なのか?宇宙実証において小型衛星の放出はロケットのピギーバック等含めていろんな機会求められているが、HTV-Xの場合はそういう衛星の実証みたいなものが中心になるのか?それともHTV-Xならではのコンポーネントの実証の方が大きいのか?
若月:衛星放出機構はこの面に実は2つ載っています。与圧モジュールアダプターの上に水平を出すためにプレートを1枚敷いてまして、その座布団みたいなプレートの上にこの衛星放出機構を乗せてます。太陽電池の下側にあります。もう1個の太陽電池の下側にも同じように取り付ける場所を用意していまして、ワイドタイプの6Uですね、20x30x10cmサイズの超小型衛星を2個と2個で最大4つ載せることができます。我々の想定としては6Uの方がユーザーを獲得しやすいだろう、人気があるだろうということで6Uにしていますが、衛星放出システムとしては縦型の3Uのサイズも想定して実は穴を打っていまして、プレートに3Uを乗っけるってこともできます。
若月:2つ目のご質問はトレンドといった感じかな?と思うんですけど、衛星放出を行うというのは、先ほどおっしゃられた通りピギーバックとかいろんなシステムがありますので、HTV-Xを利用するのがいいのかというのは、「きぼう」よりは高い高度に行けますが、必ずしもHTV-Xではなく、他のいろんなサービスプラットフォームもありますので、そっちを使ってもらう方がいいのかな、という風に思います。逆にHTV-Xならではの能力を生かしたミッションを今後やっていくべきかな、という風に思っていまして、H-SSODもやりますが、この後2号機、3号機で毎回やりますか?というと今のところそういう計画はなく、2号機、3号機では、その号機で、その時に必要な技術実証を行っていきたいと思ってます。
宇宙作家クラブ・渡部:DELIGHTのフレームに白いマーカー状のものがあるが、これは軌道上で展開する際にカメラでその様子を撮影するのか?
上土井:おっしゃる通りでして、展開している様子を計測するんですが、その手法として平面四角マーカーをパネルに貼り付けて、それをカメラで撮影して、その映像を解析することで、どういう展開をしていったか、というのを、3Dのモーションキャプチャーみたいな形で計測するというのを今計画してます。
渡部:カメラの取付位置は
上土井:HTV-Xで使われてるカメラと同じカメラなんですけど、8ページを見ていただいて、DLPバス部っていうところがあるんですけど、SDXって赤の四角で囲んである上のあたりにカメラを搭載してます。全部で5台プラス1。展開挙動計測をやるために3台のカメラを使います。そのうちの2台がSDXの赤枠のちょっと上のあたりにあり、また別の暴露搭載部のある部分にまたカメラをもう1台取り付けていて、3台のカメラで展開挙動を見ると、いうのをやります。さらにもう2台カメラがあって、それは展開した後のパネルの段差ですね。それがどのくらいかっていうのを、今回アンテナとして構造体を使おうとしているので、平面度を高める工夫をしているので、それが宇宙で実際どうかっていうのを確認したいというところで、2台のカメラで、この8ページの左の図のパネル8枚の中央ら辺に板があると思うんですけど、そこ格子模様を書いていて、格子投影法というのがあって、その模様をカメラで撮っていくと、そこからどれだけのずれが出ているか、という段差の計測ができるので、そういう技術を入れています。
NVS・斎藤:「こうのとり」7号機のリエントリカプセルのような、物資を戻すというような技術ミッションを行う予定は?
若月:「こうのとり」7号機の時に超小型の回収カプセルを実証しました。それは技術実証としてJAXAが行ったもので、運用フェーズという観点では私たちが国際宇宙ステーションを利用している間は米国の回収船がありますので、それで実験物資を回収していて、今すぐに私たち固有の回収機がないと困るというような状態ではないので、技術実証だけで止まっています。HTV-Xそのものは再突入して焼却されるということで回収船ではありませんと。HTV-Xの技術実証ミッションの中でこの後どう展開していくかは、4号機、5号機と続いていきますので、そういった中で回収に特化したミッションというのが立ち上がってくるのであれば、再度挑戦して実施する可能性はあるかな、という風に思います。